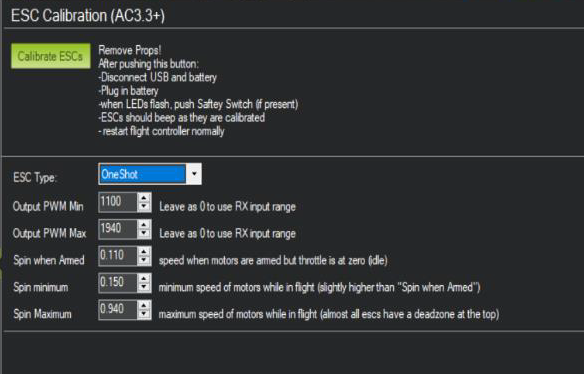
set the “throttle calibration Mode” to Range and the numbers should be 1100-1940. and check to see if the specific motor is in the drop down on “motor edition”’ that is what we have been doing and it seems to work well. We also went into the mission planner tuning and set the refresh rate at 10Hrz. We have been running the 460247 FW.
Changing hardware parts have a significant impact on flight behaviour, especially on propulsion or power side. Re-flashing your ESCs with the previous firmware could solve this issue. Did you asked KDE ?
Maybe a new full PIDs tuning could solve this.
English people have an expression for that, no ?? : “If it works, don’t fix it!” (or something like that)
Hi;
I have the same problem.I had no problems with v3.6.x. I had a problem after updating v.4.x.
I noticed that the MP works better when the ESC Type Normal is selected.