Need help please diagnosing why this fault has happened.
We have a Foxtech Gaia Elite Pro fitted with the Cube Black.
We followed the setup steps in Arducopter and it has been flying reasonably (could be better in loiter) for about 10 hours.
However during a reasonably challenging survey in mountain ranges using terain following, we experienced a strong yaw to the left with the error message "potential thrust loss (5) and followed by an over correction to the right "potential thrust loss (3) , nearly 90 deg both ways. There was also a marked drop in height of about 5 m whilst the reported faults occured.
The wind was reasonably strong from the south of maybe 10m/s and the down wind attitude was quite level to fly at 6m/s.
The fault occurs at 9:23:05 in the timeline.
Its a scary thing to see happen especially when it looked fine for some time.
Could severe turbulance / downdraft have caused this?
Are the (5) and (3) numbers actually the motor arm numbers?
Hey @Paul_Soo
First, You are not following the SB_0000002.
Set, BRD_TYPE == 3
EK2_IMU_MASK == 7
(or EK3_IMU_MASK == 7 if using EKF3)
INS_USE == 1
INS_USE2 == 1
INS_USE3 == 1
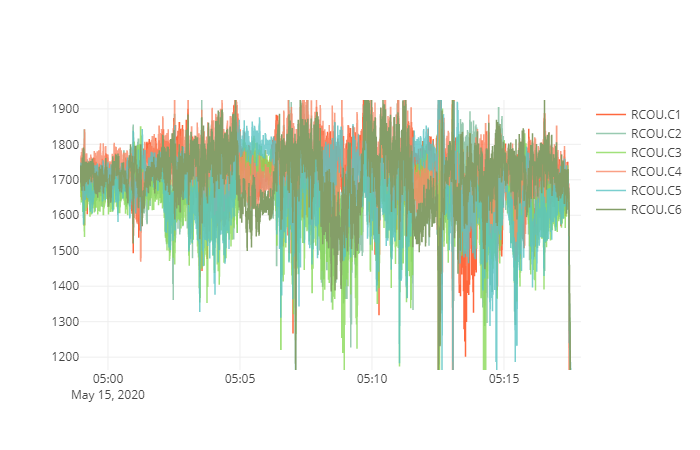
Are you using U8 lite with alpha ESC? If yes, set MOT_PWM_MAX & MIN. How did you set MOT_THST_EXPO? Did you bench test the motors before deciding the expo?
Your motor outputs are hitting maximum. Looks like your EXPO param is not right.
I have checked the following SB_0000002 params:
BRD_TYPE == 3 (Param is set on mission planner to == 3) EK2_IMU_MASK == 7 (The param is currently set to 3 but I am unable to change to 7 as mission planner rejects the value. Could you please provide an explaining as to how i can change this param)(SOLVED, I wasnt watching the number change when selecting EKF3- it was late:)
INS_USE == 1 (Param is set on mission planner to == 1)
INS_USE2 == 1 (Param is set on mission planner to == 1)
INS_USE3 == 1 (Param is set on mission planner to == 1)
No we are not using alpha ESC. They are T-Motor FLAME 60A. Maybe they are linear and dont need a curve?
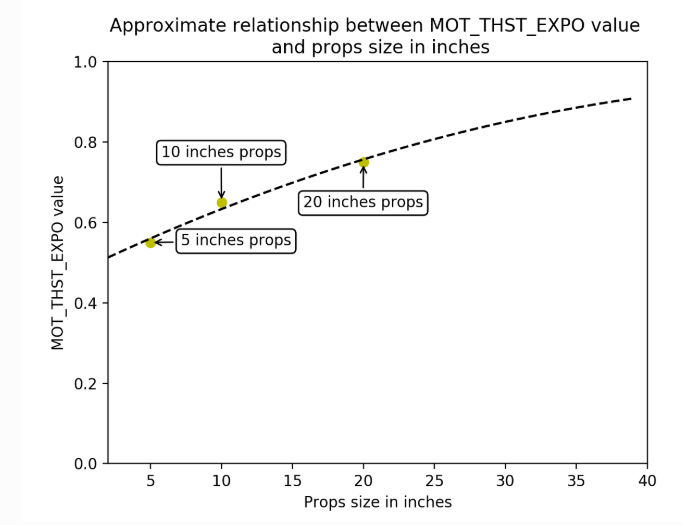
The MOT_THST_EXPO value was set using the attached graph from ardupilot with 29inch props:
Today, an ESC calibration will be attempted but this time all at once with the cube. I previously used the manual method with a servo tester that displayed PWM (1000-2000). Looking back I should have used the min/max pwm output of the cube.(1100us-1900us)
Vibrations with the two stroke generator are a pain. The OEM antivibration mounts are only good vertically while straight and level. During high winds (which the OEM says it can handle) the antivibration mounts have a shearing action as the airframe tilts forward greater than 10 deg and vibrations get transmitted to the airframe. I have added some small antivibration rubbers and a bracket on the rear to hold back the “shearing effect” but it varies in effectiveness.
What would you recommend doing for furthur diagnostics?
Thanks EosBandi,
We finally got the nerve to do the autotune and all went well.
Used a fixed dummy load and feels a lot better but still a bit of a buss.
As one chap mentioned in the other forum, the U8 on this platform is pretty taxed. We are flying at MTOW and the turbulant winds going across the valley we are surveying makes for a very interesting experience.
Now that the ESC’s have been calibrated and auto tune done ( we just had time to do it once) it seems to have less peak vibrations as well.
We have added some additional foam dampening on the generator by simply squeezing some memory foam (AKA weather seal) and that has helped as well.
The next step is to figure out how to smooth out the terrain following and tune the WPNAV_SPEED_UP and Down parameter …Thanks everyone!
Hello we have a 160 hybrid as yours from foxtech… And having issues with loiter mode… It wobbles a lot, could you help us please with your pids and your parameters? Any help would be really appreciated.Our mail is denisktmsx@gmail.com
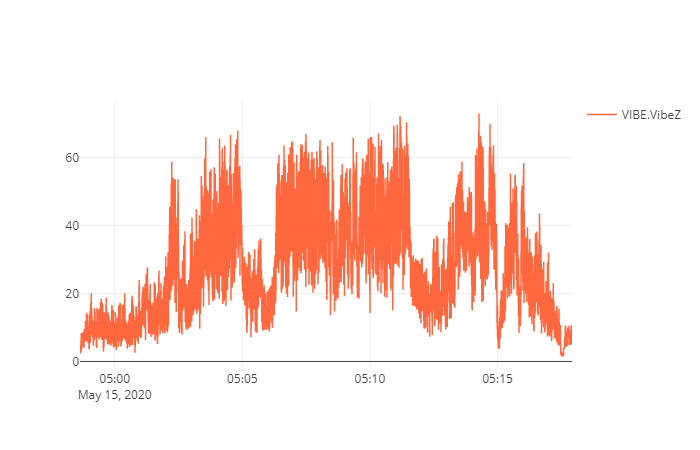
Y vibes and Z vibes are not good - You might need to isolate that generator some more. X axis vibes are OK.
Have you got another log of flight after that Autotune?
Today we had an autotune flight… With no 2t engine… Baterrys only. We sucefully tuned pitch and roll. It was a bit windy and in our try to tune yaw we had a little crash… I am posting the logs