Which is the best option to power the Cube? I have the Power brick Mini and 2 Castle Becs 10A. I don’t have a Mauch PM as recommended.
-Option 1: Power brick Mini to “Power 1 port” and castle bec to servo rail. (In this case if Power 1 fails, the cube gets power from Bec connected to servo rail, as on Pixhawk 1?)
-Option 2: Power brick Mini to “Power 1 port”, castle bec to “Power 2 port” and another Castle bec to power rail. (In this case if power 1 fails, the cube gets power from Bec connected to Power 2?)
I actually did both . As noted above, and unlike the old Pixhawk 1, applying power to the servo rail does NOT provide backup power into the FMU on the Cube. Likewise, the cube does not provide power out to the servo rail. Applying power to the servo rail only supplies last ditch backup power to the IOMCU, which is of little practical use to begin with but I still do it.
Power brick included in the box with the cube goes to Power 1
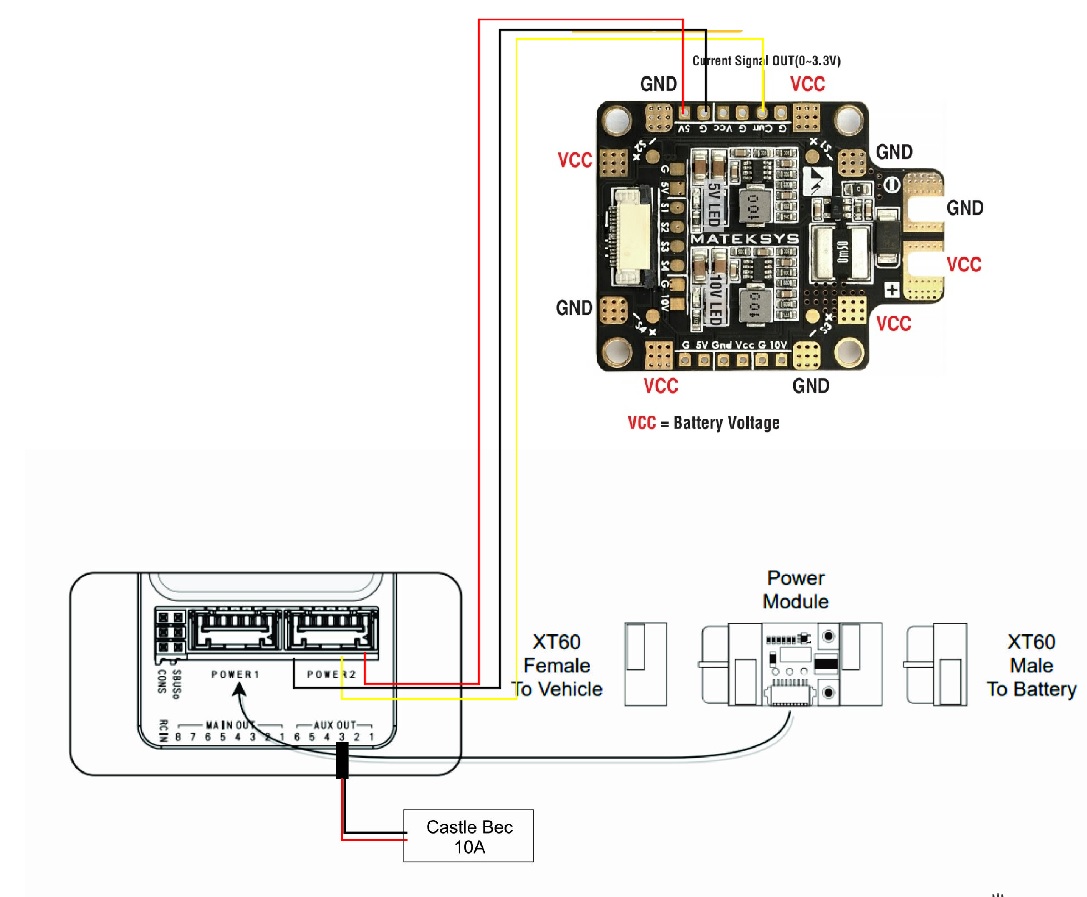
A 5 volt 10 amp BEC from the power distribution board sends power to the servo rail on an unused slot as backup power for the IOMCU, and also to Power 2 as backup power for the Cube, and also to power the HereLink air unit.
On a loosely related note, I found the other day that USB power alone to the cube will not be sufficient to run the cube, Here2, HereFlow, and an SF11/C Rangefinder. All those devices take power from the cube. So if you have all those devices hooked up and are only powering the cube on USB (like sitting on a desk), sensors start acting strange. I was very confused by sensor readings that made no sense. Once I hooked up main power, everything started working properly.
I will also be using a Matek PDB that has a 5v BEC and a current sensor (not a voltage sensor). So I’m thinking of using that bec and current sensor to connect to “Power 2” on the Cube.
Yes, the Cube has priorities set on which power sources it will use.
For example it will always use Power1 over Power2, until Power1 has a fault.
I think It’ll stay on Power2 then even if Power1 comes back good, until Power2 has a fault (until pwered off completely)
I’m new with the cube , will using two power bricks work if connected together and one is plugged into power 1 and the other into power2 with one battery and or separate the two bricks and use 2 batteries and on a quad use one ESC on the servo rail, will this work