Hi community, kindly asking for help. I have custom build 22" quad on 12s power system. Today during one of test flight I made tight yaw turn resulting in copter instability and ended in heavy crash. We frequently fly this craft but we have never experienced anything like this even if flying aggressively and on higher speeds. Any advice much appreciated. AC 4.1. Log attached: https://drive.google.com/file/d/16FuQ_a73Q7Y7ZO5N2U8Y60lHW5eE5pdO/view?usp=sharing
What motors and ESCs do you have?
I would return ATC_THR_MIX_MAX to 0.5
It looks like when you commanded yaw two of the motors were hitting minimum output, possibly desyncing or nearly stopping and being commanded up again to try and maintain stability
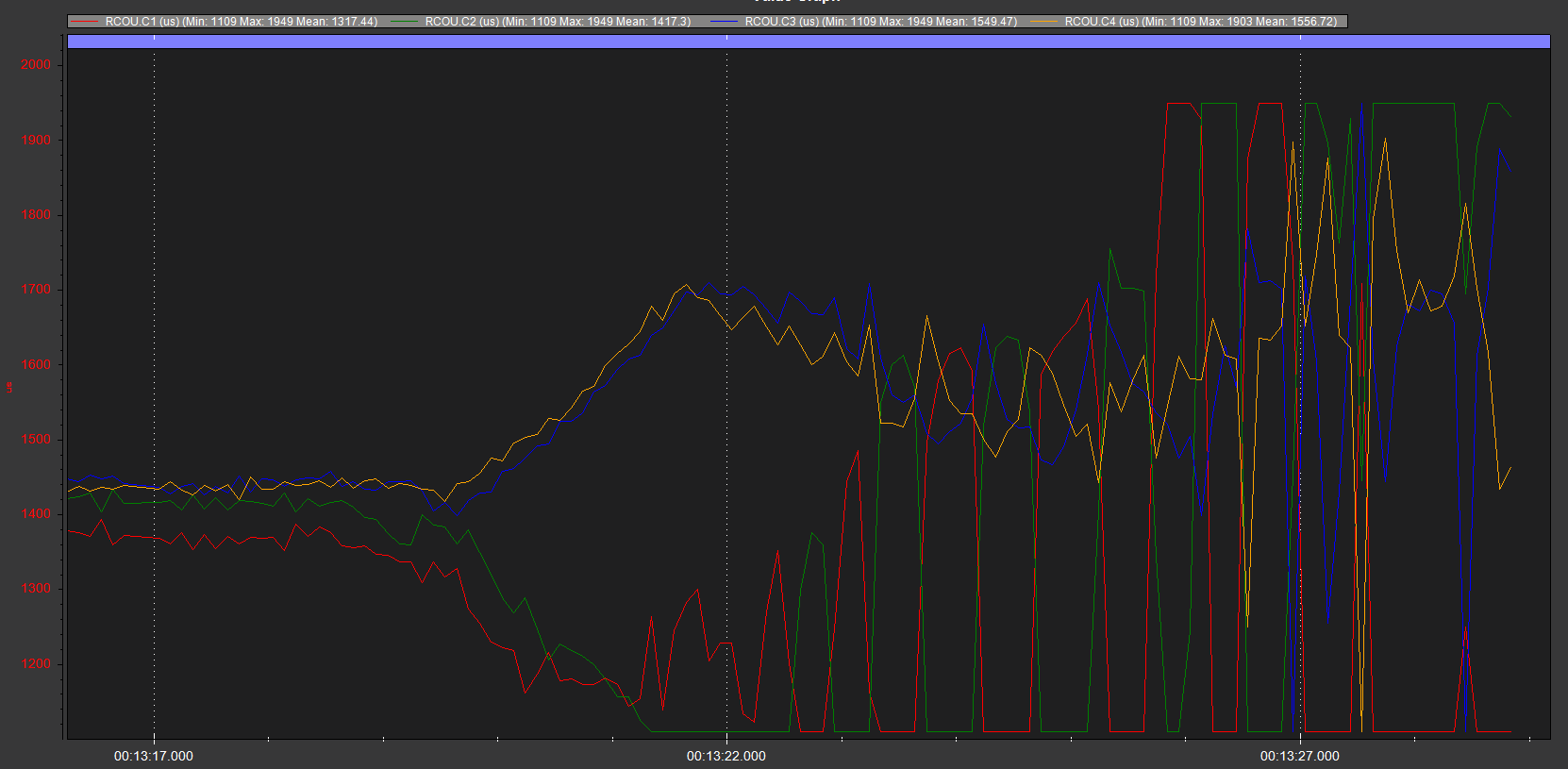
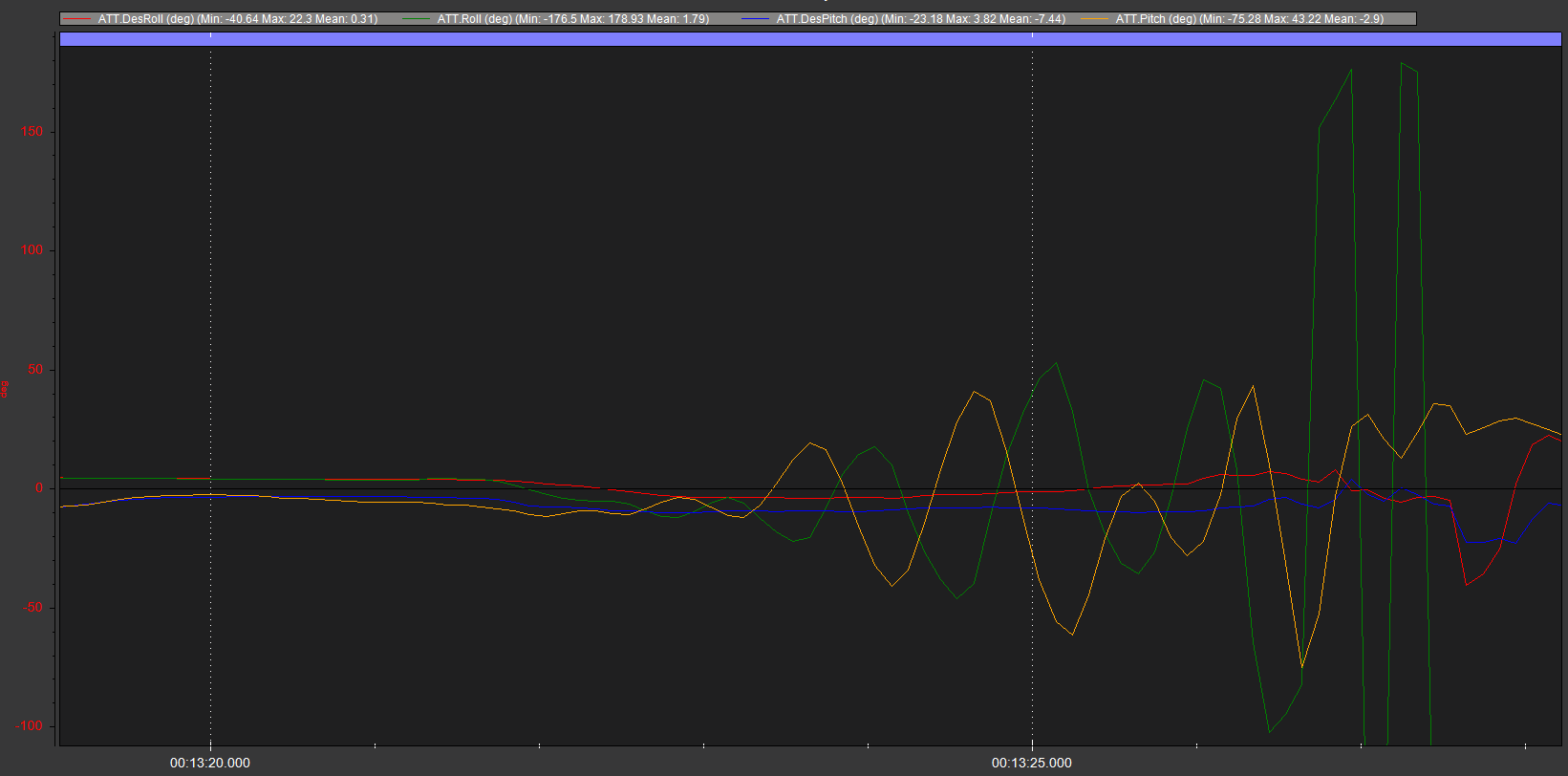
…which resulted in every-increasing oscillations. Strangely the desired yaw was maintained, but pitch and roll were lost
Generally motor output is in the low range, around 1400 PWM, so you might want to add some dummy payload to get that up around 1500 (or 1600 at most).
Just eye-balling your pitch and roll graphs, you might want to reduce ATC_RAT I terms a bit and increase the ATC_RAT D terms - it’s hard to say by how much, maybe 10%, but you’d have to work through the Tuning Guide in detail.
If you get the crash damage fixed and it flies well with pitch and roll input you should be able to run Autotune on those axis.
Thanks Shawn, I am using T motor arm sets with P60/170KV motors with integrated ESC FLAME 60A HV.
Generally with those T-Motor combos you need these settings
MOT_THST_EXPO,0.4
MOT_PWM_MIN,1100
MOT_PWM_MAX,1940
Hi Shawn, so we have just finished new build replacing crashed one. Will be using Hobbywing X6 combos instead of T motor as we found them nowhere in stock. Do I need any specific settings as you mentioned above for T motor combos? I have been told that Hobbywing is solid alternative but no experiance at all. Thank you.
For anything other than the T-Motor ESCs, use the standard values generated by the initial parameters calculator in MissionPlanner.
You can access it by pressing Alt A or go to Setup, Mandatory…, Initial Parameters and plug in your prop size to get MOT_THST_EXPO
and use
MOT_PWM_MIN,1000
MOT_PWM_MAX,2000
then do semi-automatic the all-at-once ESC calibration
https://ardupilot.org/copter/docs/esc-calibration.html#semi-automatic-esc-by-esc-calibration