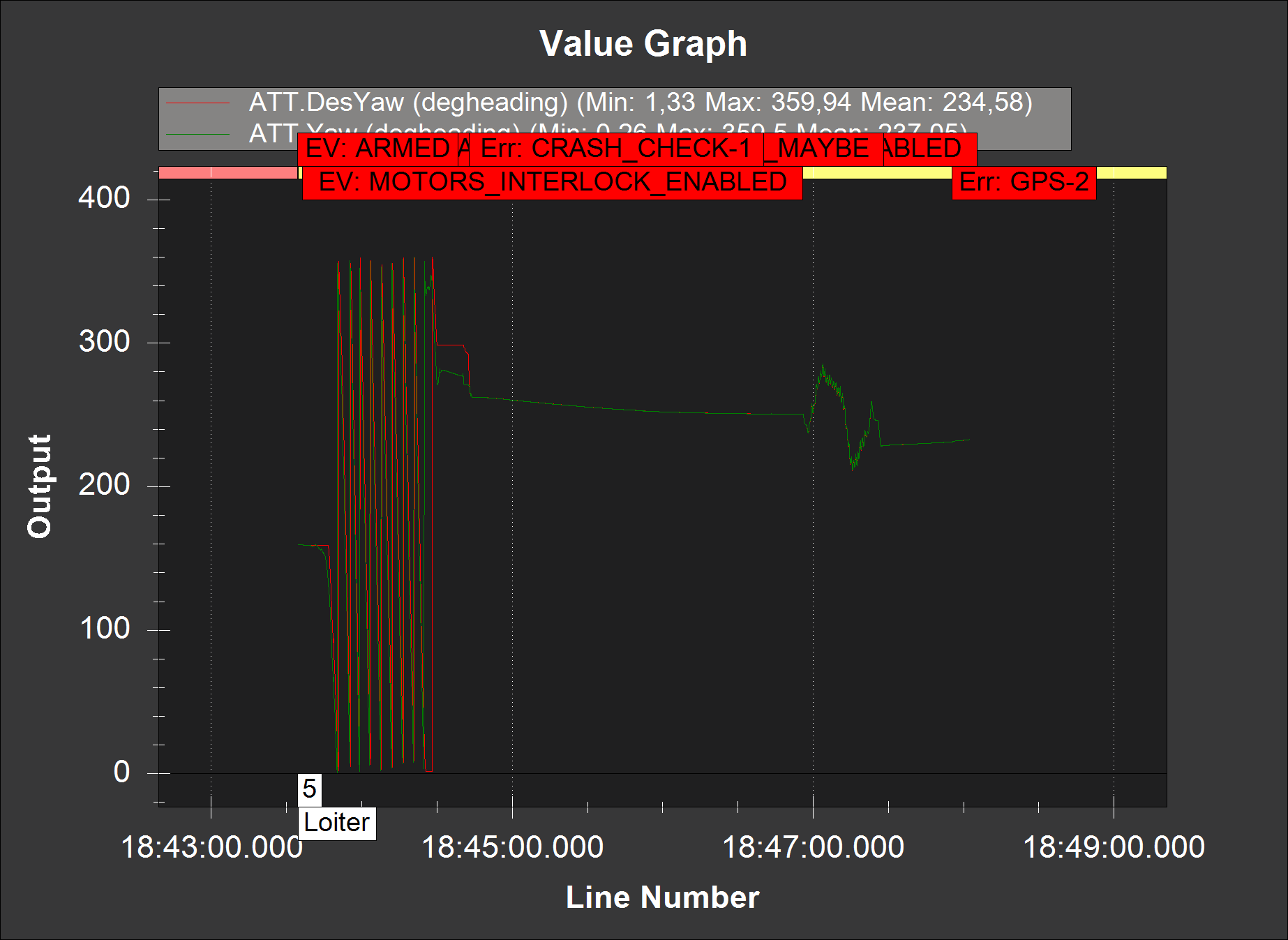
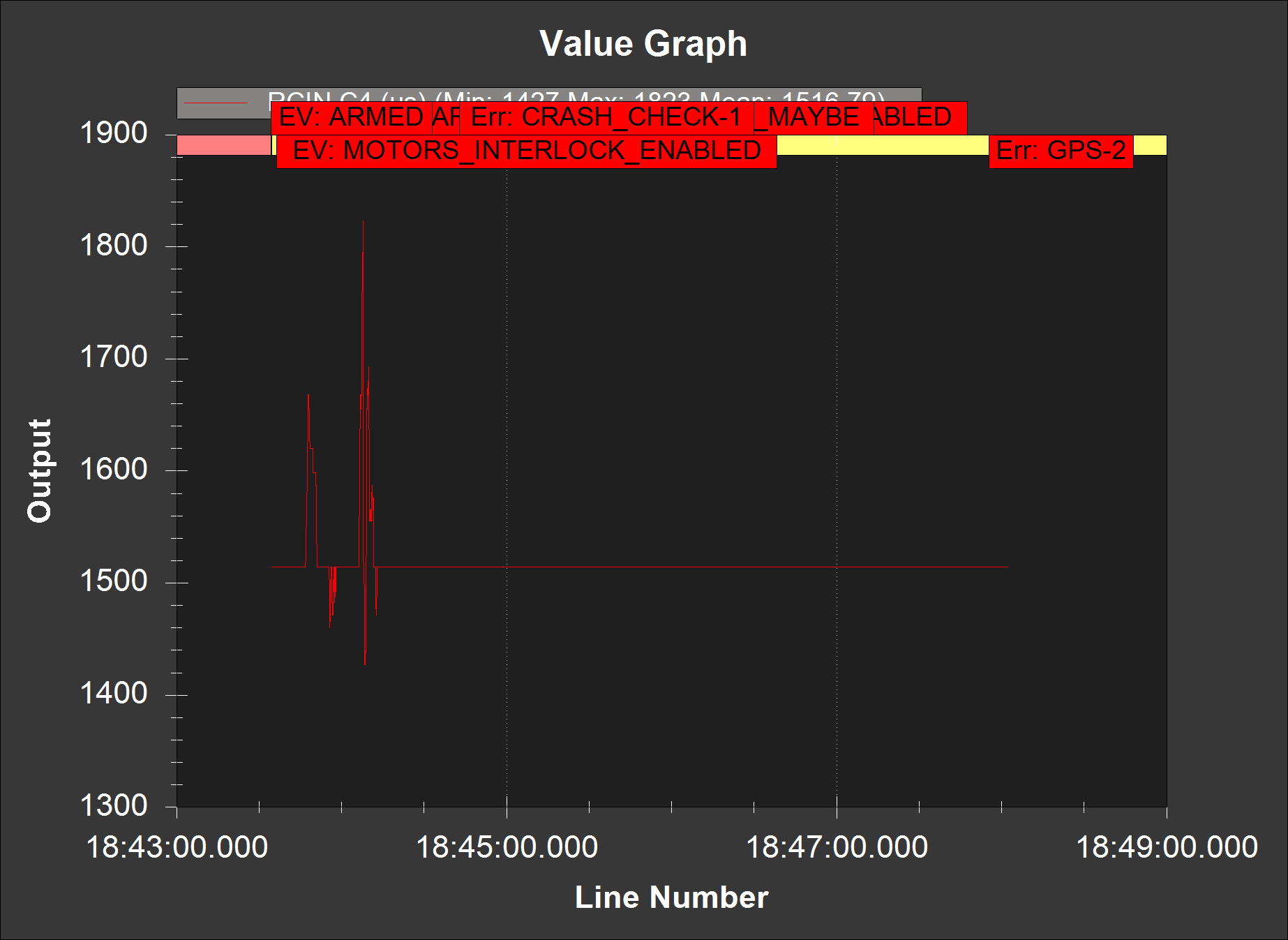
kindly asking for help regarding issue that occurred during last test flight of our new custom build quad. When taking off drone started to spin clockwise with constant speed but pretty fast. No reaction on yaw inputs from Herelink but stable position hold in loiter mode. I decided to land and I finally succeeded but could not disarm because of that spin so it resulted in minor crash ( two broken props). Quad is 22” props, Black Cube, Here2 GPS, 4.0.3 Arducopter, 12S power system and cca 8,5kg weight. We have already done several test flights with no issues, flying nicely and stable. I am quite new to Cube ecosystem but have been building and flying copters and wings for long time. What I see in log is that this yaw rotation was desired so drone just followed this instruction but I failed to find out what is causing that spin. I checked RCIN for YAW and I see nothing wrong. See pictures below and attaching log file as well.
I believe that someone more experienced from community might find the reason for spin in log file.
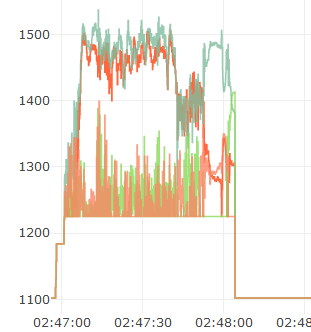
Your motors 1 and 2 (CCW) are working mid-range power, but your motors 3 and 4 (CW) are doing almost nothing except to try and maintain stability.
This implies you’ve got a problem with motor alignment, usually motor mounts twisted on arms, or arms and frame flexing, and it’s more than motor torque can correct for and still maintain flight.
You’ll notice in the graphs (and logs) that desired yaw closely follows yaw even though that doesnt match the RC yaw input. This happens so that the D term doesnt build up too much. The same holds true for Pitch and Roll too - desired and actual wont be allowed to deviate too much or there’s PID/control issues.
Also a .bin log is better for fault-finding, it contains all the parameters and messages too.
Try ATC_INPUT_TC,0.2 or as much as 0.25 to soften the RC Input a bit, since this seems to be a pretty big quad.
You can see there’s motors that are basically “off” in order compensate for the motors that are running near maximum to counter the physical yaw problem:
Once that’s fixed up we can re-evaluate the pitch and roll tune and more…
So I have perfectly levelled all motors, have set ATC_INPUT_TC to 0.2 and made another test flight with no spin issue so it looks this is fixed up. Quad performed quite nice. Link to log below.
If you have suggestions how to evaluate pitch and roll tune I would appreciate your assistance. I have not done autotune yet. Thanks! https://drive.google.com/file/d/1lYRPmqzD3BIAUYkZbQ13vHiY67147z_G/view?usp=sharing
Should I set AUTOTUNE_AGGR to 0.1 or better lower? Regarding weight balance I will check but it is regular center-design quad so not much to adjust, no payload. What I see in log that one motor is all the time lower than others. Will double check balance.