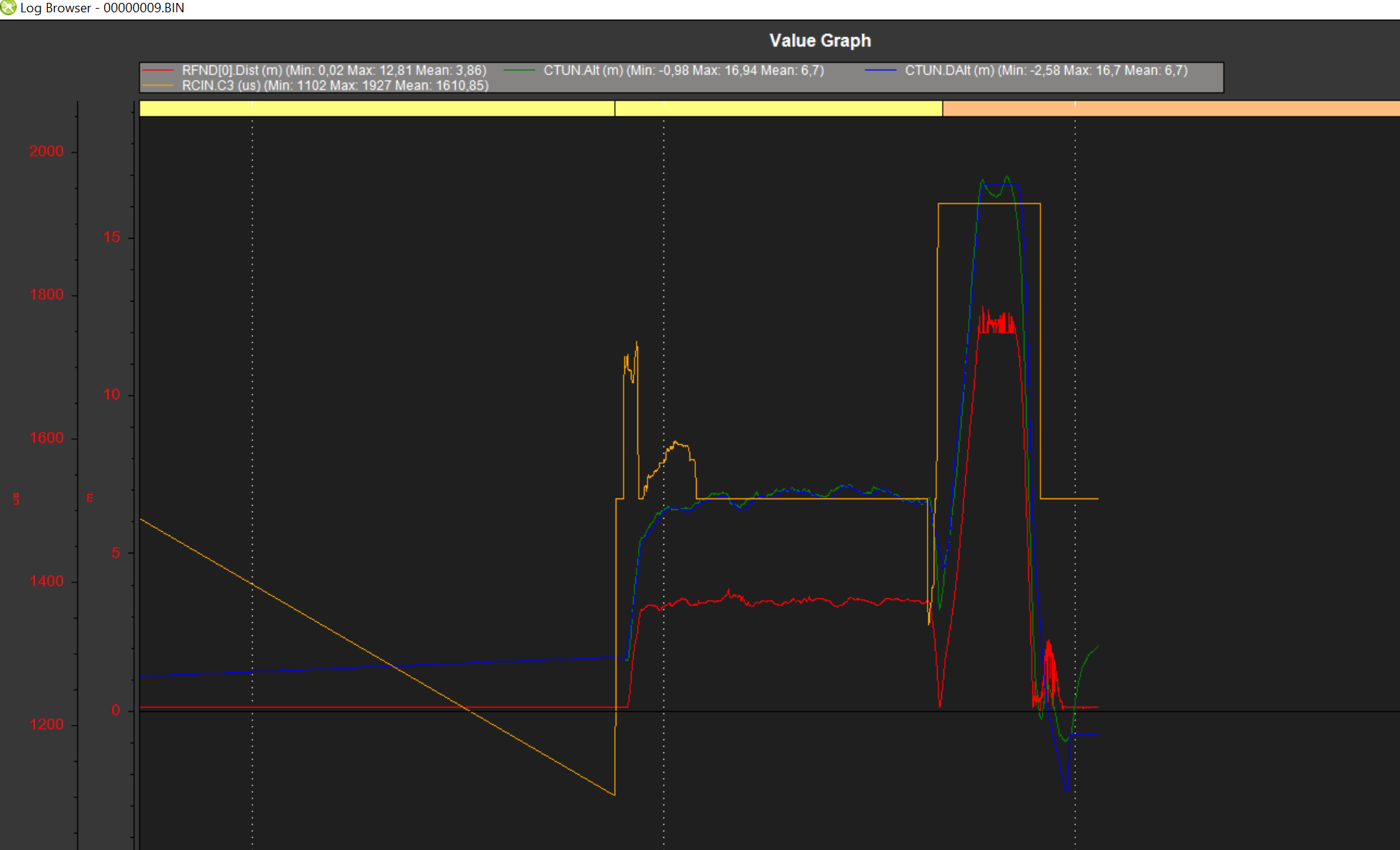
I was tunning my last quad, and I had a odd behaivor. I was hovering, 2 metters high , then I move the THR down to go down, and the quad start to descend very fast, so I turn the THR full up, but the drone didnt respond. Here is the moment, including the rangefinder measure. I can see on the graph when I pull up, the quad didnt want to go up.
After that, the drone hit the flor very hard, and the herelink turn off or maybe rebooted, so it went to the home position, going down very hard and hitting the flor again, where the battery holder broke, the battery start to hanging arround, but finally the drone could land. 00000009.zip (3.5 MB)
Here is the bin file.
Just an Update, Today went to try again, and the resutl were better, but the problem still there. First I try to autotune the quad, and I got an error that say: “Autotune: Failling to level, manual tune may be required”. I have never got this kind of message, and I thought this happend beccause the wind. Anyway I keep trying to do the autotune and was imposible. The quad has the initial parameters that the “Alt+A” tool from MP has, and some additional tunning on the P, R and Y made by me.
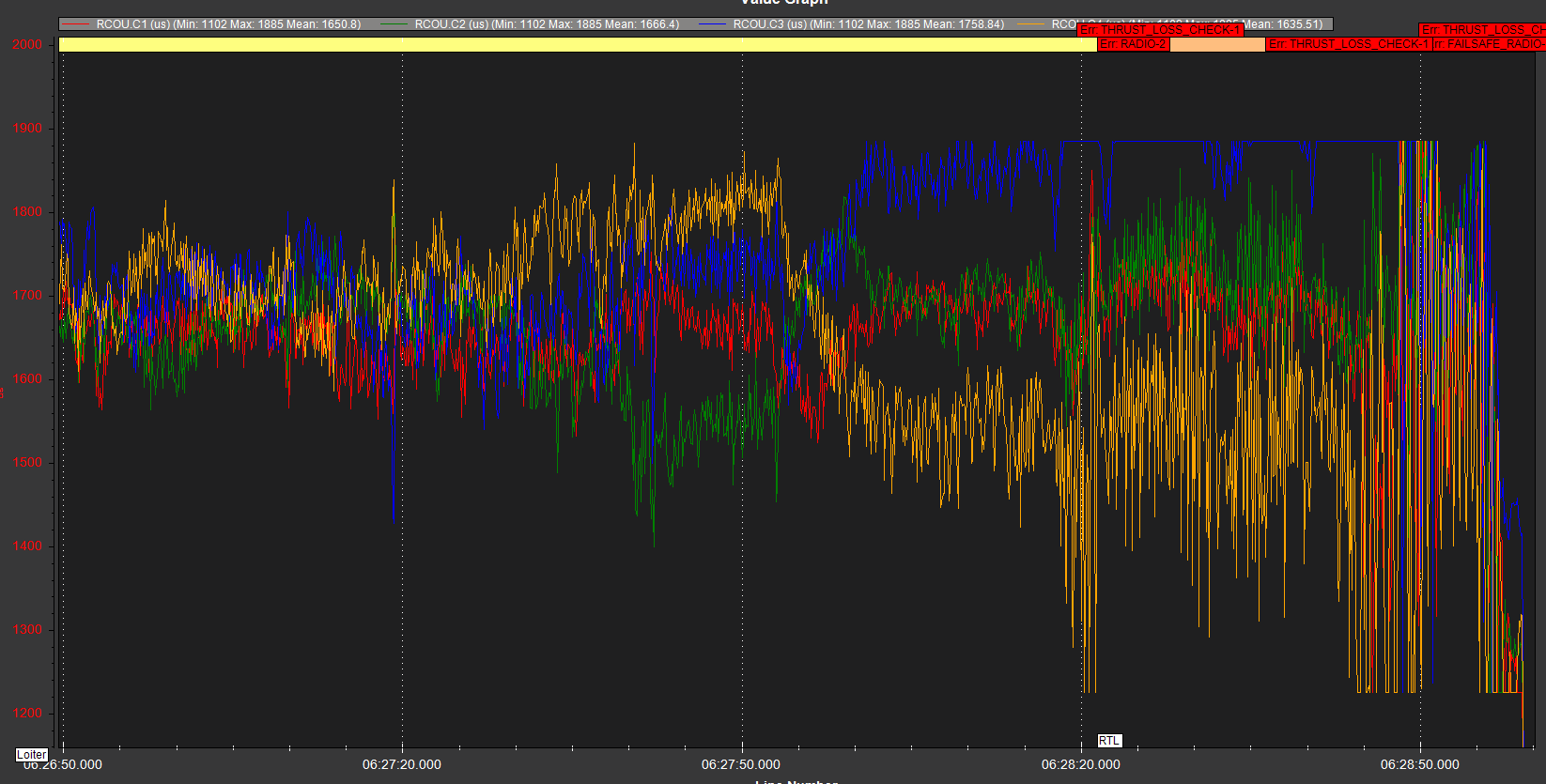
As the AutoTune didnt work, I start tu tune it manually, and got betters resuts, until the drone start to fall again very fast…Now I had the Speech enable from MP, so at the same moment the drone start to go down, the Loose of thrust on Motor 3 show up. Now I understand that motor seems to be bad, because has the same that fail 2 days ago.
But I don understand why the drone start to fall that way. I understand the motor cant deliver as the FC wants, but its clear the drone can hold up on the altitude I was (3 or 4 metters). I had to pull up again to gain alttitude and try to land without damage, was difficult, but I did it.
Motors are running near maximum just to fly at all, as voltage drops a bit Motor 3 is hitting absolute maximum and Motor 4 has to reduce output for the craft to remain stable.
Thanks ,yes, the quad its quite heavy. We are changing the motors.
Question, I have check the motors and in fact, motor N4 was damage, so my question here is why is motor N3 going max if the 4 was going down? My common sense say if that happen the quad will flip. It not suppose to be the oposite?