Hi there, I’m new to the Herelink family!
I noticed one thing right away, after calibrating the sticks: The RC Output is very low resolution. I analysed the RC RAW values and found only roughly about 100 steps over one full gimbal range.
I suspect this is due to too much jitter with the hall gimbals otherwise? Has anybody else noticed this?
I have same problem, RC low resolution doesn’t matter when flying, but really annoying with gimbal. Is this a hardware or software problem? @Michael_Oborne@Alvin
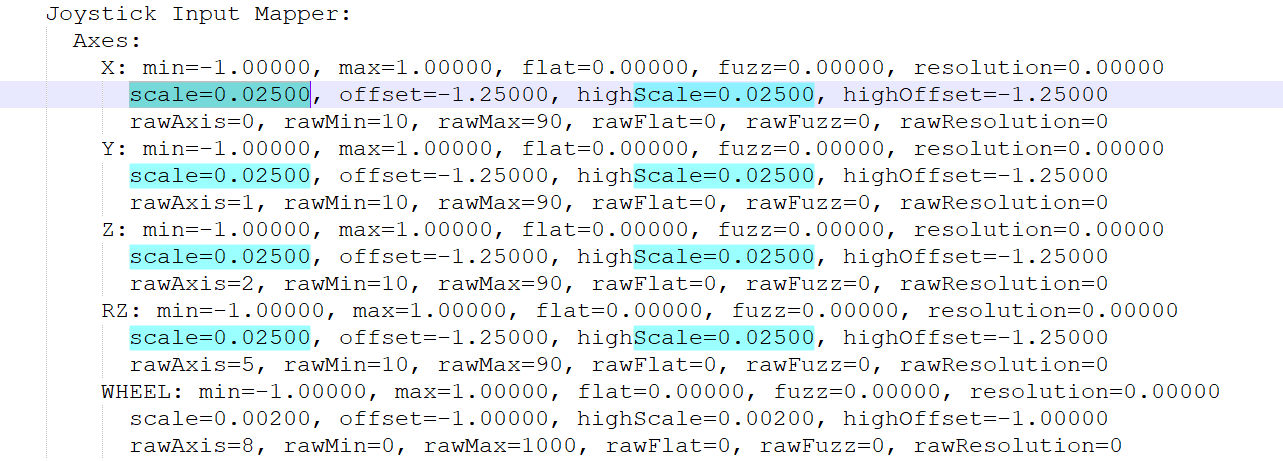
Thanks for the answer, however it looks like the problem is with the joystick “scale” parameter, the axes values are in the range (-1,1) with scale step = 0.025, which equates to 80 steps across the full range, very low resolution. Is there any internal command to change this parameter?
I get it in dump log of Herelink (adb bugreport).
Maybe we have problem with the rawMin and rawMax values:
rawMax = 90
rawMin = 10
Range = 90-10 = 80, so scale = 2/80 = 0.025.
I know Herelink used magnetic sensors for joystick (mlx90393), but I don’t understand why the raw value is so low. While WHEEL still uses variable resistor and has resolution = rawMax - rawMin = 1000.