greetings!,
i’m running a cube orange quadcopter with iflight 80a succex escs.
i have unresolved issue with potential thrust lost. and its due to low thrust to weight ratio from the motors.
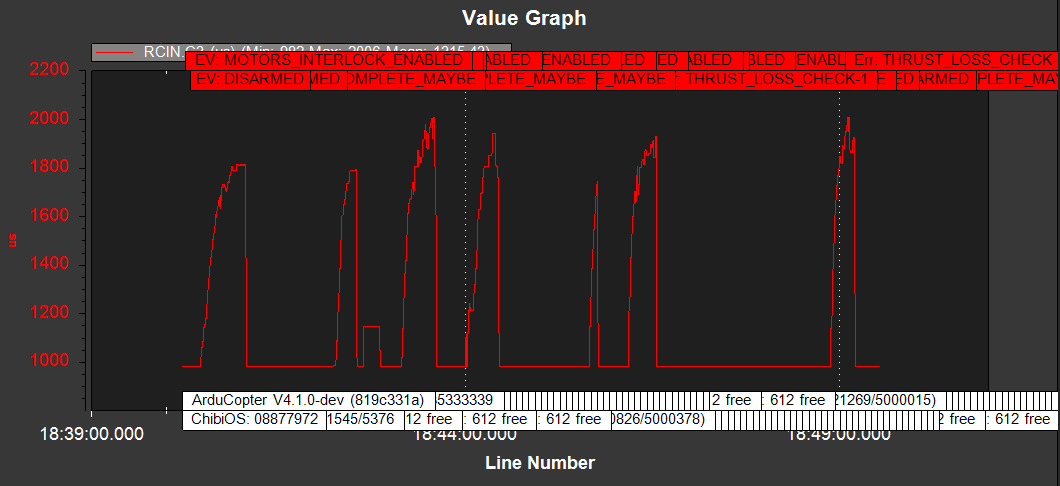
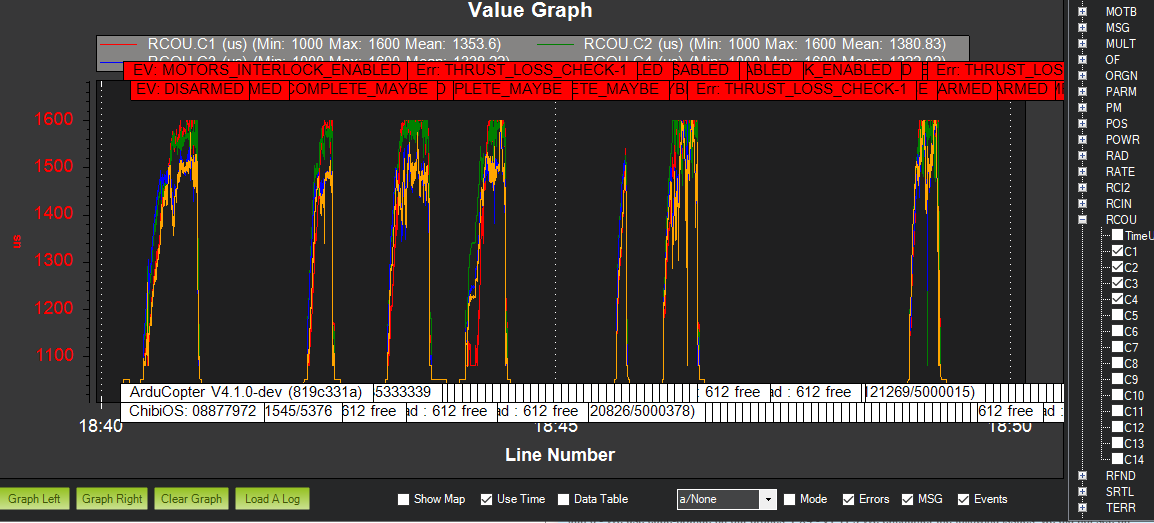
recently i checked the bin files and found RCOU values are limited to 1600 us. but RCIN is in proper range.
i think this rcout limitation is the reason to the thrust lost. is there a parameter to limit the RCOUt in the cube or the problem is BLheli firmware parameter issue with escs’ ?.
There’s no such Cube Orange limitation, but there’s plenty of Arducopter parameters that affect that sort of thing.
The primary issue is you’ve got MOT_SPIN_MAX 0.6 set, which is non-standard. Change it to 0.95
Also you can set a bunch of “initial parameters” using the MissionPlanner plug in by pressing Alt A on the keyboard, or by following this spreadsheet
There’s some other issues, you’re trying to use DSHOT, which is the way to go, but you need to use the AUX outputs.
Set these params first:
BRD_PWM_COUNT,4
SERVO1_FUNCTION,0
SERVO1_MAX,2000
SERVO1_MIN,1000
SERVO1_REVERSED,0
SERVO1_TRIM,1000
SERVO2_FUNCTION,0
SERVO2_MAX,2000
SERVO2_MIN,1000
SERVO2_REVERSED,0
SERVO2_TRIM,1000
SERVO3_FUNCTION,0
SERVO3_MAX,2000
SERVO3_MIN,1000
SERVO3_REVERSED,0
SERVO3_TRIM,1000
SERVO4_FUNCTION,0
SERVO4_MAX,2000
SERVO4_MIN,1000
SERVO4_REVERSED,0
SERVO4_TRIM,1000
then reboot and apply these:
SERVO10_FUNCTION,34
SERVO10_MAX,2000
SERVO10_MIN,1000
SERVO10_REVERSED,0
SERVO10_TRIM,1000
SERVO11_FUNCTION,35
SERVO11_MAX,2000
SERVO11_MIN,1000
SERVO11_REVERSED,0
SERVO11_TRIM,1000
SERVO12_FUNCTION,36
SERVO12_MAX,2000
SERVO12_MIN,1000
SERVO12_REVERSED,0
SERVO12_TRIM,1000
SERVO9_FUNCTION,33
SERVO9_MAX,2000
SERVO9_MIN,1000
SERVO9_REVERSED,0
SERVO9_TRIM,1000
Reboot again and check all those params have stayed set as planned.
Move your ESC connections to the AUX outputs instead of the Main outputs.
Also set these in preparation for Harmonic Notch filtering
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,0
On your BLHELI ESCs make sure you’ve got Low RPM Power Protect disabled.
Ideally you should have the BLHELI telem wire connected to a serial port (typically Telem2 or Telem4)
Once you get airborn OK you can set up Harmonic Notch filtering, it makes a real difference to Autotune.
Let us know if you need help with it. There’s some options depending on if you have the ESC telem hooked up or not.
hello,
thank you for your help. its amazing. everything worked like a charm.
and I’m sorry for naming the topic as cube limitation, clearly i have tampered too much with the arducopter parameters.
again thank you so much. i learned a lot from your advice.