Hello guys, I have a simple question, below is my board data initializing, take a look:
On top is the last message and bottom is the first, my question is: here in the top, as you can see it says that EKF2 IMU0, 1 and 2 is using GPS, thats ok becouse I’ve setted to use external compass from my Here2 GPS, but, as the problem is with IMU’s board, if I dont use internal compass from board i’m completaly safe to fly? Or I maybe did a mistake with those things (I’m new cube user, sorry =\ ).
EKF2 IMU0 is using GPS EKF2 IMU2 is using GPS EKF2 IMU1 is using GPS
EKF2 IMU1 Origin set to GPS
EKF2 IMU0 Origin set to GPS
EKF2 IMU2 Origin set to GPS
u-blox 1 HW: 00080000 SW: EXT CORE 3.01 (107900)
EKF2 IMU1 tilt alignment complete
EKF2 IMU0 tilt alignment complete
EKF2 IMU2 tilt alignment complete
Frame: HEXA
CubeBlack 001F0033 30385108 31353236
ChibiOS: d2030d88
ArduCopter V3.6.8 (2f409678)
EKF2 IMU2 initial yaw alignment complete
EKF2 IMU1 initial yaw alignment complete
EKF2 IMU0 initial yaw alignment complete
GPS 1: detected as u-blox at 115200 baud
Barometer calibration complete
After doing the steps mentioned in the service bulletin:
Update to latest release of Ardupilot firmware for cube black, nuttx 3.6.8.
Set the parameters as mentioned.
We tried to do a accelerometer calibration, through both MissionPlanner and QGC with the latest updates for them, resulted in a disconnection from the Pixhawk Cube with USB connection, forcing us to do a hard reboot of the Cube.
As soon as we reverted back to “INS_USE3” = 0 and “EK2_IMU_MASK = 3” we could do an accelerometer calibration.
The question is, could this be related to the problem? And how worried should we be about flying?
Can you help me with something that may be related.
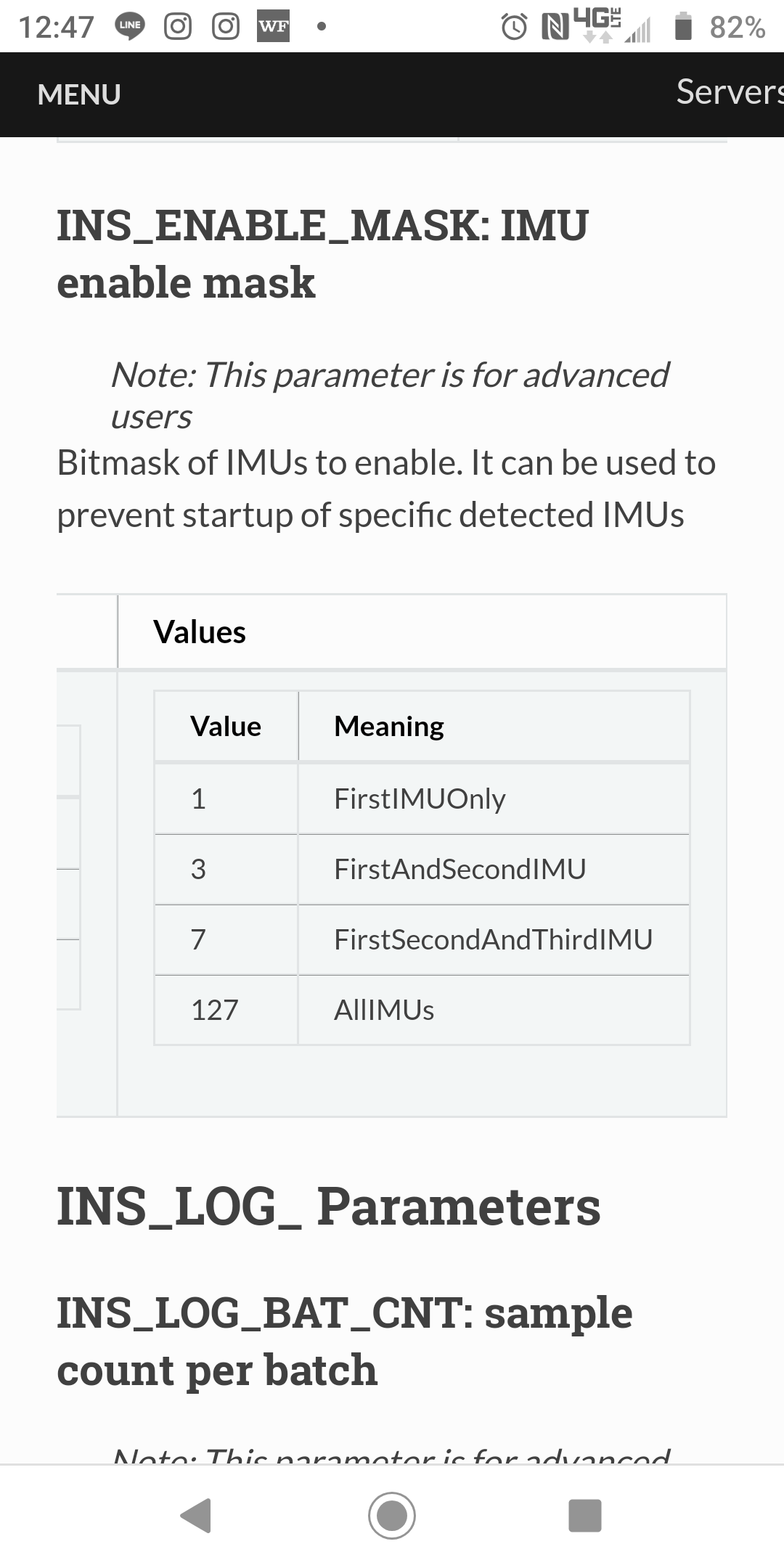
With the recommended parameter changes, should INS_ENABLE_MASK not need to change from 7 to 127?
You did not mention this but it seems logical.
Thank you.
PS: Also I see you are recommending to enable log disarm, wont that fill everyone’s SD card? I mean you did not write in the recommendations, but you added this to the param files that you shared.
When I set the EK2_IMU_MASK to 7, it correctly enables all 3 IMUs. However, with this setting mission planner changes INS_ENABLE_MASK to 127. Should I change it to 7 as well?
00000082.BIN (580.9 KB)
Can you please check my todays log because today as soon as I take off drone drifted towards me and hurted me so badly.May be this is due to imu failure.It injured me very badly.Please provide me full detail.
Hello @sumit2002
Kindly start a new topic. This is supposed to be for announcements.
I hope you were not hurt badly.
You haven’t followed any of the instructions given on this topic before flight.
The firmware is Copter 3.6.6 while the fix was made on 3.6.8.
All IMUs are not enabled.
Follow the Instructions given by@philip
I cannot stress on this enough. Also follow more safety guidelines. The flight mode channel is set as 5 but the Flight controller only receives 4 channels from Radio. Also First flight mode is set as RTL and the other as stabilize.
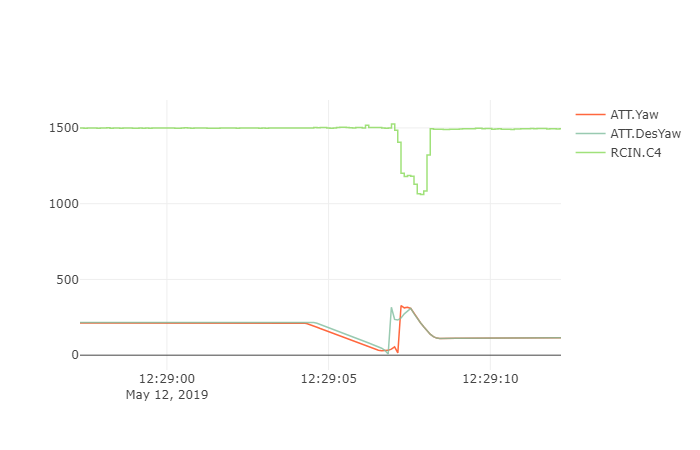
While going through the log I noticed that It is yawing without change in RC4in ( Desired yaw too).