A new parameter has been added to Ardupilot 4,x and later which will allow a significant improvement on the behaviour of the Here2 magnetometer.
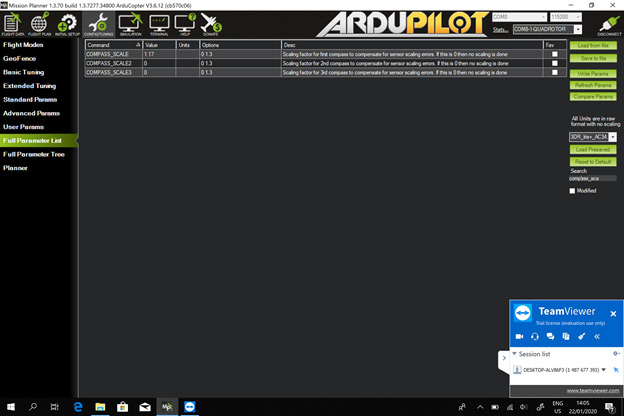
So for running a Here2, please recalibrate your compass and check that the parameter COMPASS_SCALE is approximately 1.17 to get the best results on our hardware. This is for CAN and I2C versions of the Here2
for 3.6.12 and later versions of 3.6, this parameter will need to be set manually
Just asking how this got trough your HERE2 design validation / quality checks?
What CubePilot and associated companies will do differently in future to avoid this?
This fix should have been made on ArduCopter at latest on the launch of HERE2.
I have updated my quadplane to 4.0.2 and I have recalibrated the compass. But the COMPASS_SCALE parameter remains zero, it has not automatically changed to 1.17. Then I changed it manually. Is this correct or should it have changed automatically?
Just to tell my experience… I always had problems with the Here2 Compass because always was very “delicate” to the magnetic fields. At the moment I wrote 1.17 and press Write on the parameters, the Ready to fly sound from the pix I got.
It seems i have found my self with a couple of Here2 that for the last couple of days started showing Orange/Red on the EKF while flying. I know that my Z vibes (on the particular vehicle)changed and started going on the red zone as also my clip2 was scaling. Could this be the culprit of my EKF change? I just set compass scale to 1.17 and i have not tested yet to see if its all well or it will fly like crazy, but i did notice that even though i had this new setting, now my compass would only calibrate on relaxed fitness, while the previous time it would calibrate easily on strict. https://plot.dron.ee/ptDg
Your comments would be appreciated.
This is what I got on my Herelink after doing a compass calibration with GPS lock and connected to GPS 1 port. I am running Copter 4.0.3. See the compass_scale is 0.