Trying to figure out how to mission plan a quadplane to land, delay, drop off a ball, then takeoff. I can set the Do_set_servo to drop the ball but can’t figure out the land, delay, takeoff part. Any help would be much appreciated.
I think Mission Planner is quite straight forward on setting the mission waypoints
https://ardupilot.org/planner/docs/common-planning-a-mission-with-waypoints-and-events.html
Alvin,
Yes, for simple missions I would agree. Can you post an example of a quadplane mission that would do the following:
Vtol takeoff
Transition
Fly 3 waypoints
Detransition
Vtol Land
Delay on ground 10 seconds
Drop cargo
Vtol takeoff
Transition
Fly 3 waypoints
Vtol land at different location
Disarm
Thanks
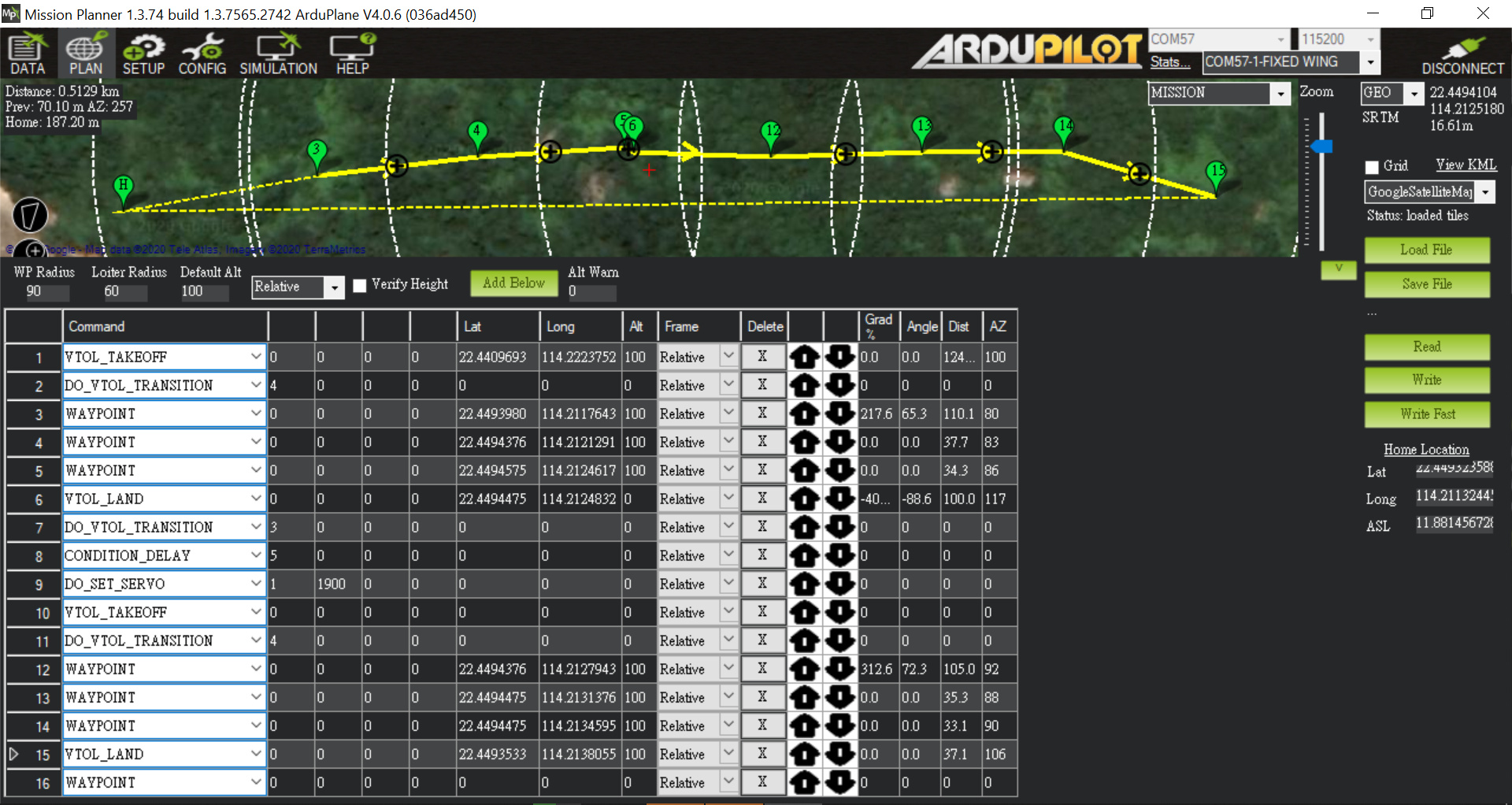
I didn’t try if these settings actually works.
You can learn more from the ardupilot wiki
https://ardupilot.org/plane/docs/quadplane-auto-mode.html
The plane should disarm itself when it lands on the last waypoint, as mentioned here
https://ardupilot.org/plane/docs/automatic-landing.html#after-the-flare
At the moment, I have only seen one implementation as was described on Andrew’s tutorial on how to resume a mission after landing.
Advanced ArduPilot Mission Planning - continue after land - YouTube .
His approach is landing > disarm using an Aux function > delay > arm using Aux function > takeoff > continue.