I recommend you enable all compasses and do the Compass/Motor calibration - this can be hazardous if done wrong, be careful and follow instructions.
I’d enable the Fence, included in settings below - you wont be able to arm and takeoff without a good 3D fix. Once everything is very reliable maybe you could change or disable the fence if required.
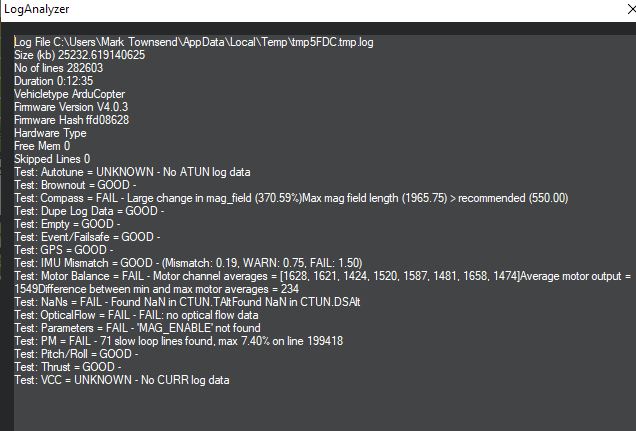
It looks like Autotune has fixed up some parameters, and some others were close to what I’d use, but I’d highly recommend setting all these and run Autotune again. Disclaimer: I’m guessing at your prop size but these should be better than defaults.
ACRO_YAW_P,2.50
ATC_RAT_PIT_FILTD,15.00
ATC_RAT_PIT_FILTT,15.00
ATC_RAT_RLL_FILTD,15.00
ATC_RAT_RLL_FILTT,15.00
ATC_RAT_YAW_FILTE,2.00
ATC_RAT_YAW_FILTT,15.00
AUTOTUNE_AGGR,0.75
BATT_ARM_VOLT,22.10
BATT_CRT_VOLT,21.00
BATT_LOW_VOLT,21.60
INS_ACCEL_FILTER,20.00 (maybe try 10 or 15 for this)
INS_GYRO_FILTER,30.00
MOT_BAT_VOLT_MAX,25.20
MOT_BAT_VOLT_MIN,19.80
MOT_THST_EXPO,0.71
PSC_ACCZ_I,0.60
PSC_ACCZ_P,0.30
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
FENCE_ACTION,3
FENCE_ALT_MAX,120 <- adjust to suit safety
FENCE_ENABLE,1
FENCE_MARGIN,5
FENCE_RADIUS,300 <- adjust to suit safety
FENCE_TYPE,3
Copy/paste into notepad, save as {something}.param and load it via MissionPlanner - this save searching and typos.
For a smoother feel try this:
ATC_INPUT_TC,0.2
or as low as 0.3 but you need to experiment to see what’s right for you.
In your photo, it looks like the ESCs are just sitting there - definitely secure them if they’re not already.