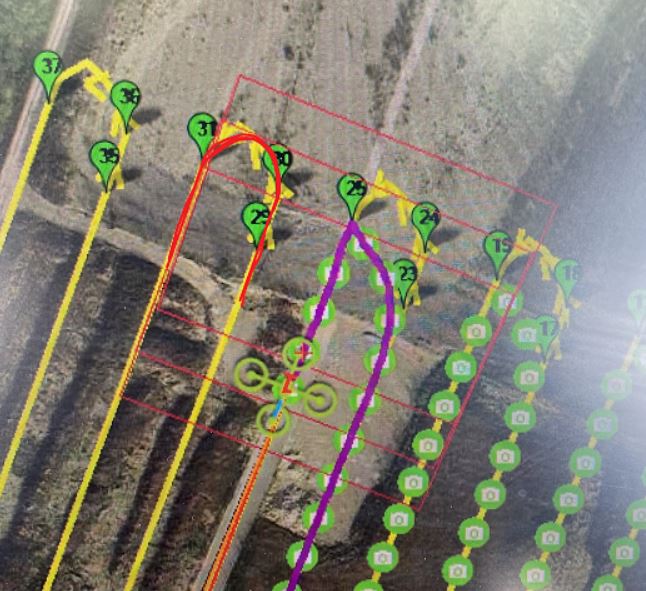
Actually the different behaviour on some turns can be put down to aircraft speed, and maybe wind could be playing a part too - the aircraft is unable to make the turn as expected so eventually it has to stop and turn in order to hit at least some of the waypoints.
This is where S-Curves is different, and dynamically calculates the speed and accelerations to hit each waypoint and maintain a symmetrical entry and exit.
You could maybe improve it now by reducing the WPNAV speed before those turns at the end of each leg.
Thank you very much, got it
im just wondering a bit: yesterday for example i had this at 4m/s a just a little bit of wind. If i use UGCS as a groundsoftware it fly perfect splines no matter which speed or wind (Same UAV, same situation).
Whats the difference?