Hi
I´m trying to set up correct values for Dynamic Harmonic Notch Filter.
Please advice if this is wrong forum for this issue.
I have Cube black, copter 4.0.0 in dji s900 frame, all stock…arms and props etc. 10000Mah battery. That gives me around 15-20 mins of relaxed flight time.
My Gremsy S1 is still waiting to get enought trust to my copter for installation and flight with camera…too many crash in the past.
Herelink RC with small action cam as pilot cam.
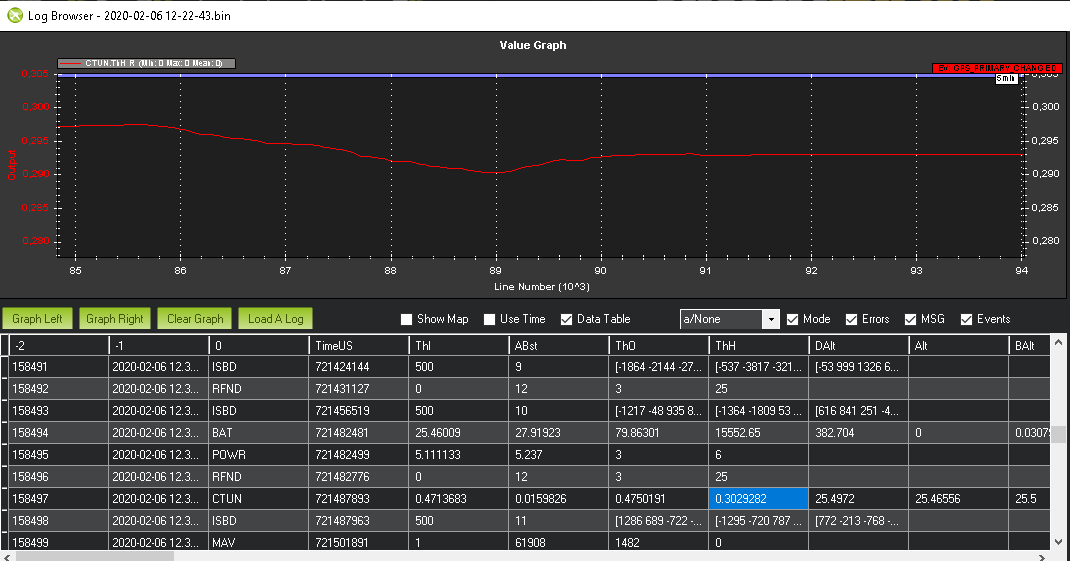
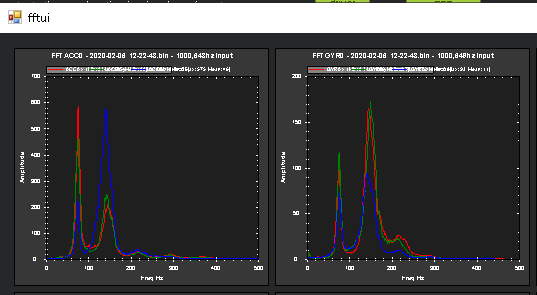
Per instructions link , i belive that i have manage to establish the Tht hover value and also i got FFT Gyro / FFT Acco values, see attatched screenshots. Please give your opinion if you see something strange…
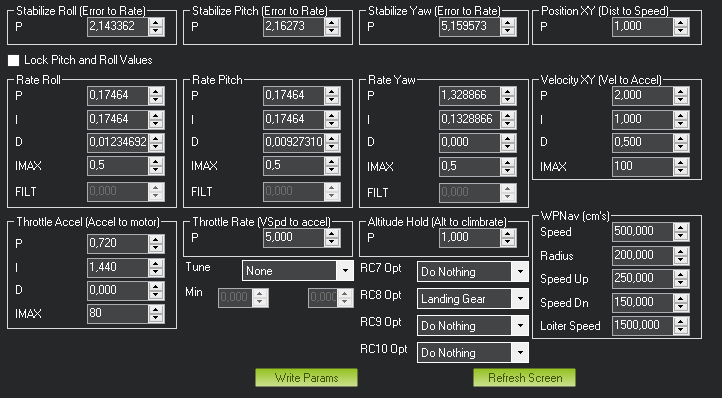
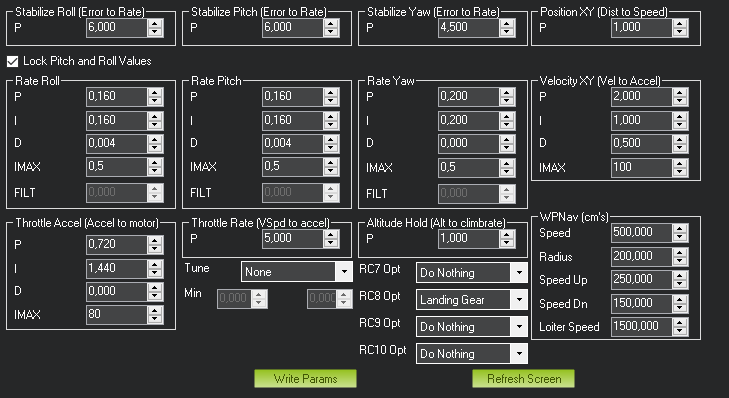
Now, im following instructions and have set:
INS_HNTCH_ENABLE = 1
INS_HNTCH_REF = 0,3029282 per Tht hover ±30sec on alt hold
INS_HNTCH_FREQ = ??
INS_HNTCH_BW = ??
should frequency for INS_HNTCH_FREQ to be set following
FFT gyro = 150Hz ? (@9000rpm) or,
FFT acco = 141Hz ? (@8460rpm)
and about INS_HNTCH_BW , im a bit lost here, when i look at FFT graphs, in my understanding it´s around 55-70Hz. Dont really know what to look…please advice.
Another thing, before upgrading my hexa to 4.0.0 it was flying quite stable, but now when i make even a gentle move, copter swings from side to side like a kite. When turning fast yaw, copter do almost extra 3/4 yaw turn after releasing stick´s. What parameter is controlling the breaking in yaw?
Just did today another autotune with more aggressive settings (0,085) to see if i can get rid of that behavior without any luck.
Diagnosing these symptoms from log´s is beyond my capabilities, so it would be much appreciated if someone would have time to take a look of my log file and give me a hint or a pointer to what direction i should go with tuning.
kind regards Mikko