We are using the cube in an octoquad config with a tethered power system. Until recently, this drone has flown fairly well, and we’ve been able to iron out most issues that come up.
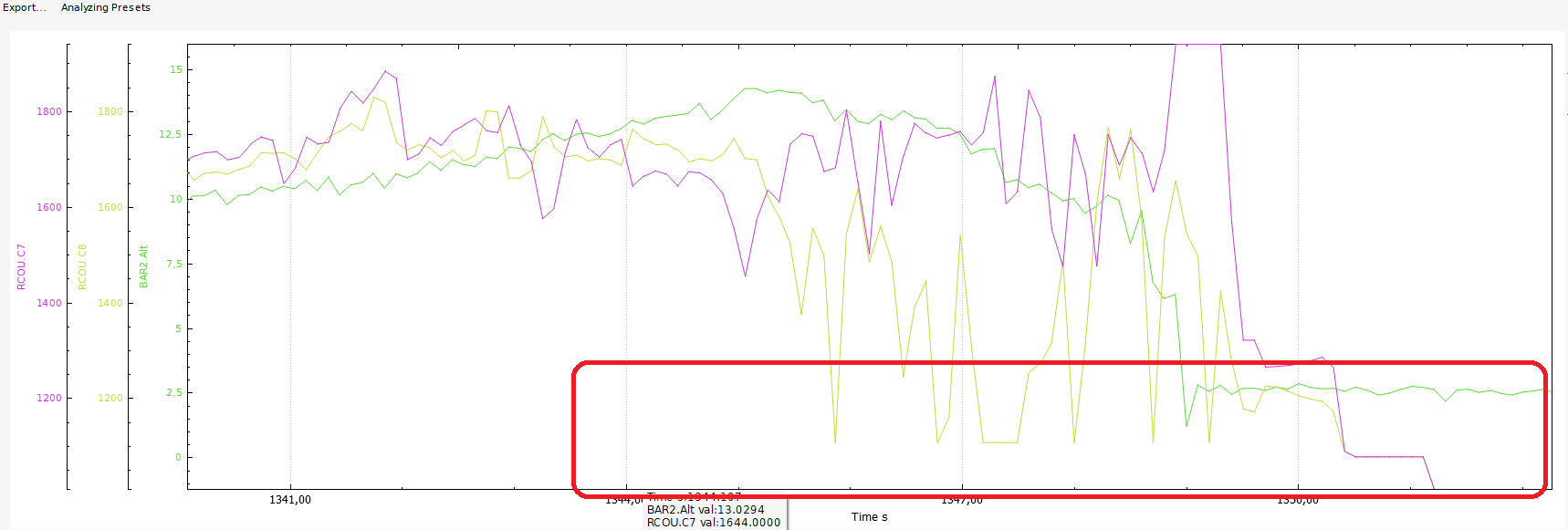
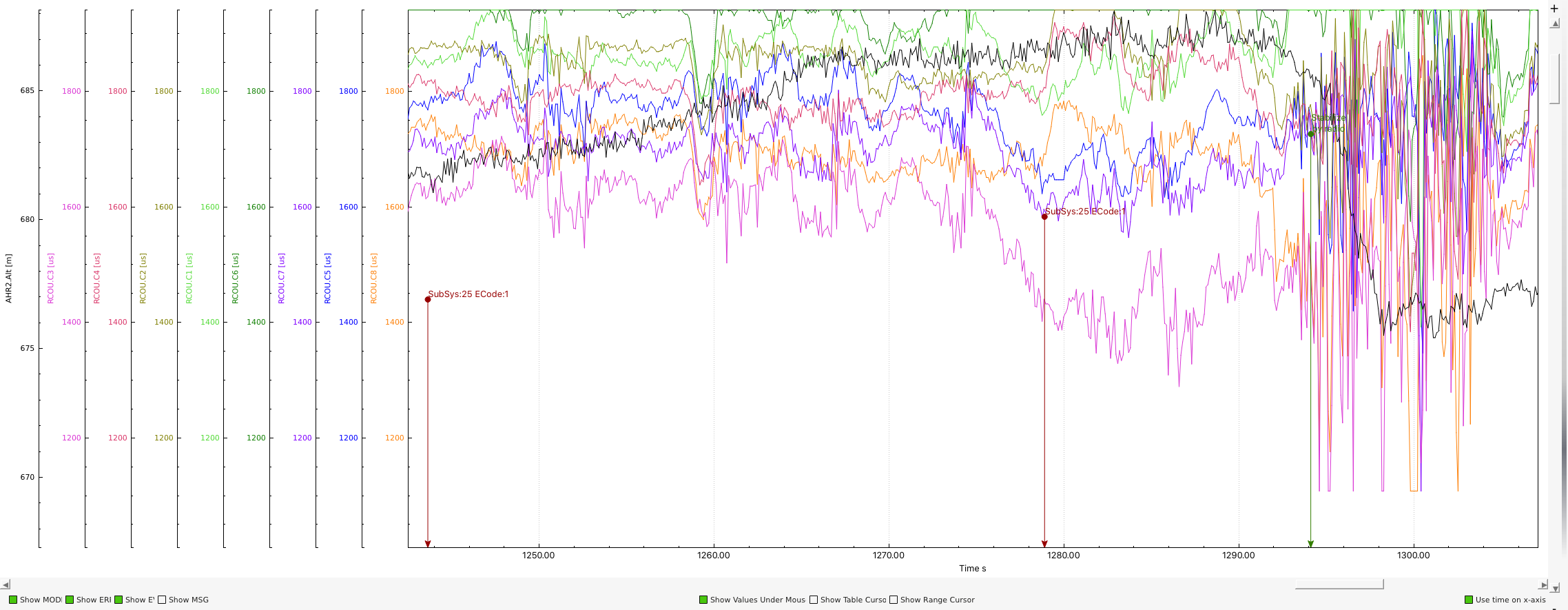
However, during our last 3-4 flights, we received “Potential Thrust Loss” errors, and even with adequate power the drone falls from the sky with full throttle input. I’ve attached a log from our last flight before the airframe broke, hopefully one of you can see something we don’t. Thanks in advance!
How much is your power source? how many watts?
The FW version you have?
MAybe a video of how the drone felt?
I only see this motor behavior, almost on all the pairs (8-7,6-3,5-4,1-2), some motors on the bottom and some on the max, that make sense with the power lost.
I see on the telemetry your max amp was 55Amp and average voltage 22V, so you powersource must have at least 1200Watts
Do you have a power converter on your drone? what kind of cable are you using to connect the power from the ground?
Thanks for the quick response. We are running ArduCopter 4.0.3, but I’m unsure of our power source MAX limits (I am one of a few working on this vehicle). Unfortunately we didn’t get this flight on video, so logs and broken props are all we have to remember it by. We’re sending roughly 400 V DC through the tether (an amazon special for this prototype :D), with another converter in the drone to keep a consistent power source of around 24 V.
We’re determining through your feedback, and others, that between the weight of our drone and the inconsistency between motors’ power, we may just need to lighten the vehicle a little. Thoughts?
The converter in the drone is 24V w/ no load, with a limit of ~62 A continuous current. We are using 380KV motors, with 13" props. The drone weighs in at just over 9lbs.
9lb will be ok for 6 of those motors, what is the brand? did you check the motor specs? How much weight can lift each motor with that prop and that voltage? what about your ESC?