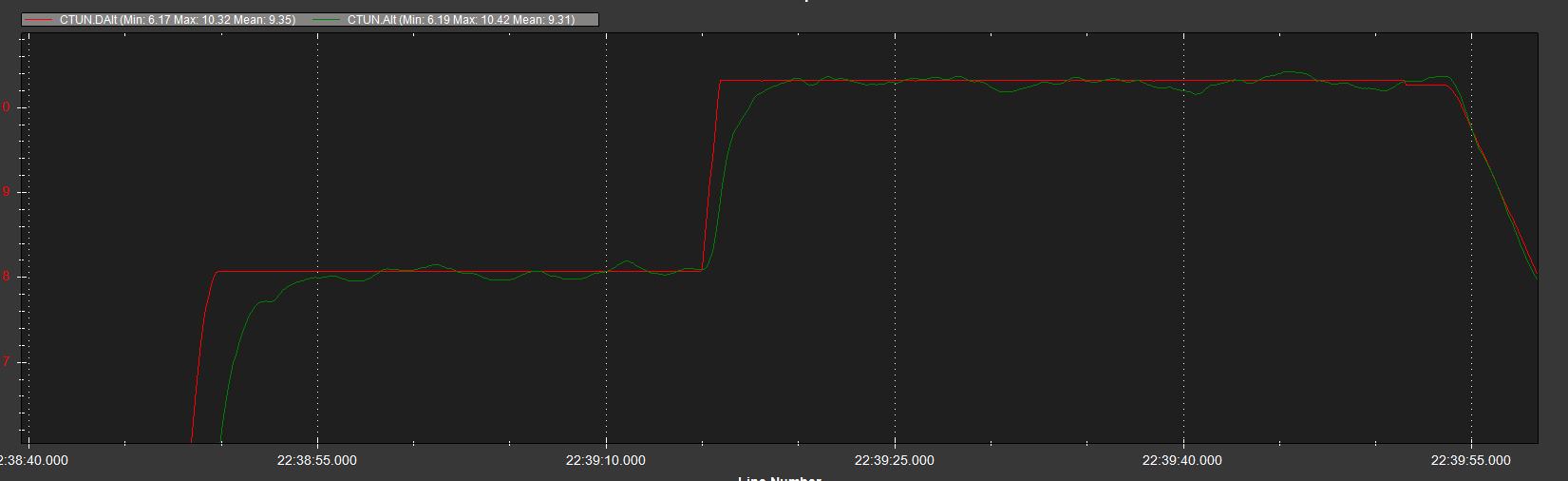
Hello, my gas is in GPS mode, and when I fly, there is a huge deviation between rising and falling. I shielded all around the motor and worked as hard as I could to avoid affecting the current, but the altitude is fluctuating and the rise and fall is continuing. No stake hovering. I need you to look at the log.
Acceleration correction and level correction are done accurately, and compas is no problem. What’s the problem?[2021-07-05 21-37-27.bin|attachment](uploa2021-07-05 21-37-27.bin (2.2 MB) 2021-07-06 21-11-28.bin (1.5 MB) d://xMtoiD4zNjzM8hWgUTn79BTJ6WG.bin) (2.2 MB)
Firmware APM:Copter V3.5.5-DDC (1dcf4e37) (whatever that is??) Any reason not to upgrade to latest stable? There’s many important and critical fixes, plus position controller updates that affect you issues.
At least use 3.6.12 if you must stay on the “3” version.
You’ve got some weight imbalance happening, see if you can shift the battery or payload to better balance the aircraft
Check you parameters against this spreadsheet, see the “3.6 and earlier” section
The filter settings are important, then run an Autotune. Hopefully that will fix up the attitude control and it will be able to hold altitude better.