I just received my sponsorship of a CubeOrange and a Here3 GNSS. I am an Engineering student from India,and my project is to come out with a system to reduce the crime rate.
I intend to build an endurance drone of at least 30 mins flight time, a drone that is controllable over the internet. And this drone reaching a destination location no sooner an emergency is triggered.Route through air is a straight line and faster than roadways of Traffic in India.
I have managed to achieve a part of it where I can control it over 4G and 5G platforms.
At present I aim to make it capable of obstacle avoidance and path finding to make it more autonomous.
I have started understanding ROS, dronekit for the same. Here is my youtube link of controlling a drone over the internet -
I am yet to test fly it post covid lockdown - Controlling my drone over the internet! - YouTube
I will keep this post updated as I progress.
Today there was a National level hackathon conducted in which we managed to put the cube orange to use. Cube orange with here3 GNSS is indeed a marvellous system! I was literally able to write a little piece of code to do waypoint navigation using dronekit. I tested out its precision indoors, and it worked amazing!!! Our team did try making the rover move autonomously through pixel segmentation, but unfortunately there were huge delay issues as we had to stream videos over the internet! I so wish we could be sponsored by a herelink as well XD.
Anyways, do check out the output of video segmentation for obstacle avoidance here:
The video was not streamed but processed after recording…latency issues…
DO check out the github repo for the rover where dronekit was used. I have written down simple functions that accept speed and duration and the rover turns right,left or moves straight here. The code also has a function through which you could send in destination GPS coordinates and rover can move there.

Hiii!
Been some time since I last posted with the progress of the DroneCop.
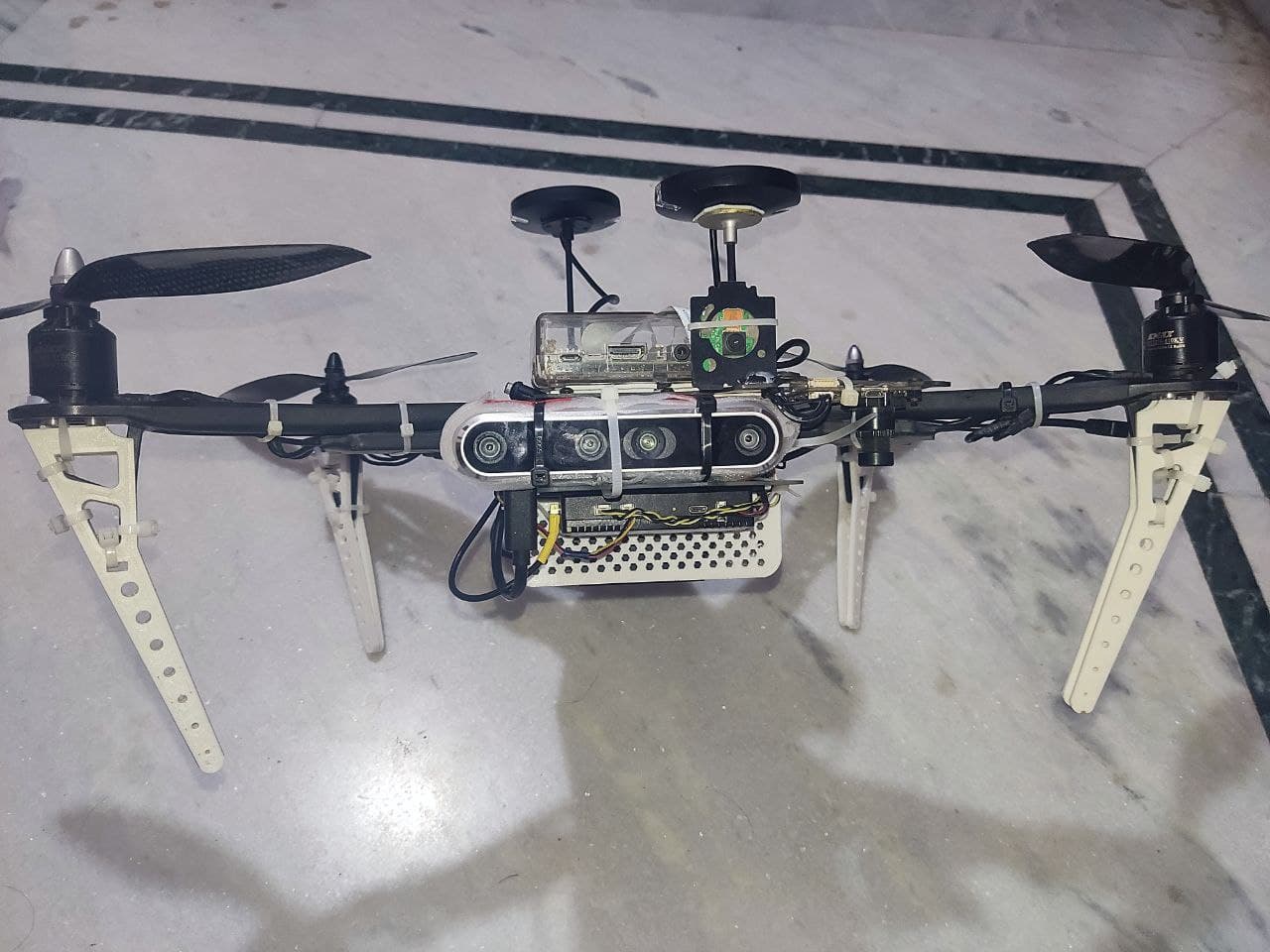
The quadcopter is built with the cube orange! THE FLIGHT PERFORMANCE IS SIMPLY MARVELLOUS!!!.
The Alti-hold feature is so precise, we definitely understand the quality of sensors incorporated with the cube orange!.
I have managed to set up a Stereo Camera and enabled Proximity sensing and collision avoidance.
To do this I made use of a a Jetson Xavier NX board and intel D455 depth camera!
I made use of the popular dead cat frame - TBS Discovery.
I faced a lil issue:
I lost my GPS lock if I just lean over the Drone under open sky. Indoors I never got a precise lock. All of this happened after the Jetson Xavier NX was installed. However I manage to fly it, only after waiting for a GPS lock for sometime, under the open sky…I failed to resolve this issue. I could improvise it by relaxing a few GPS parameters…but am unable to eliminate it. If anyone can provide guidance, it would help. I placed the Jetson board waaay below the Herelink only to minimise any interface. There possibly is no identifiable interface as well cause all the components operate on different frequencies…
Apart from this, stereo based obstacle avoidance system works like a charm!!
Here’s a little video : The quad moved away as the cameraman approached it!
Here are some pics:

Hello!
Quiet excited to let you all know that our team has managed to successfully publish a research paper at ERCICA. DroneCop, a drone based solution for women’s safety.
Our project is 80 percent complete. We have come out with an android based application through which an SOS signal can be sent by a victim or a person who is scared or threatened. The Victim’s geo coordinates are sent to firebase and using this data our drone can be immediately launched to the destination. The drone is controllable over the internet over a 4G network. Front based obstacle avoidance feature has been integrated with the help of a depth camera and nvidia jetson xavier nx board.
The automation of the final part remains where the geo coordinates are automatically readable by the drone during boot. This part will hopefully be done soon so that the project can be called complete ![]()