Expected Behavior
The stock firmware of a Herelink Controller Unit should have a straightforward way of centering the throttle for Rover purposes.
Current Behavior
With the current unit I have I am unable to center the throttle so that a vehicle will not immediately lurch forward or backwards upon arming. The current vehicle in question is a Rover utilizing the Pixhawk 2 with the black cube. The Herelink Controller Unit in question is flashed with remoteunit-FRU01200409.tar.gz. The accompanying air unit has been flashed with airunit-AU01200226.tar.gz.
The pixhawk is flashed to Ardupilot via QGroundControl using the latest 4x flash repeatedly over the last week. I’ve tried various settings within the parameters but to no avail.
In previous times with this unit I was able to figure out a way to center the throttle, but I am no longer able to do so.
Steps to Reproduce:
- Flash all to stock for Air Unit and Remote Unit.
- Flash Pixhawk to Ardupilot using QGroundControl with Chibios for the Rover platform.
- Calibrate the built-in joysticks using the Herelink Settings application and save the settings after successful calibration.
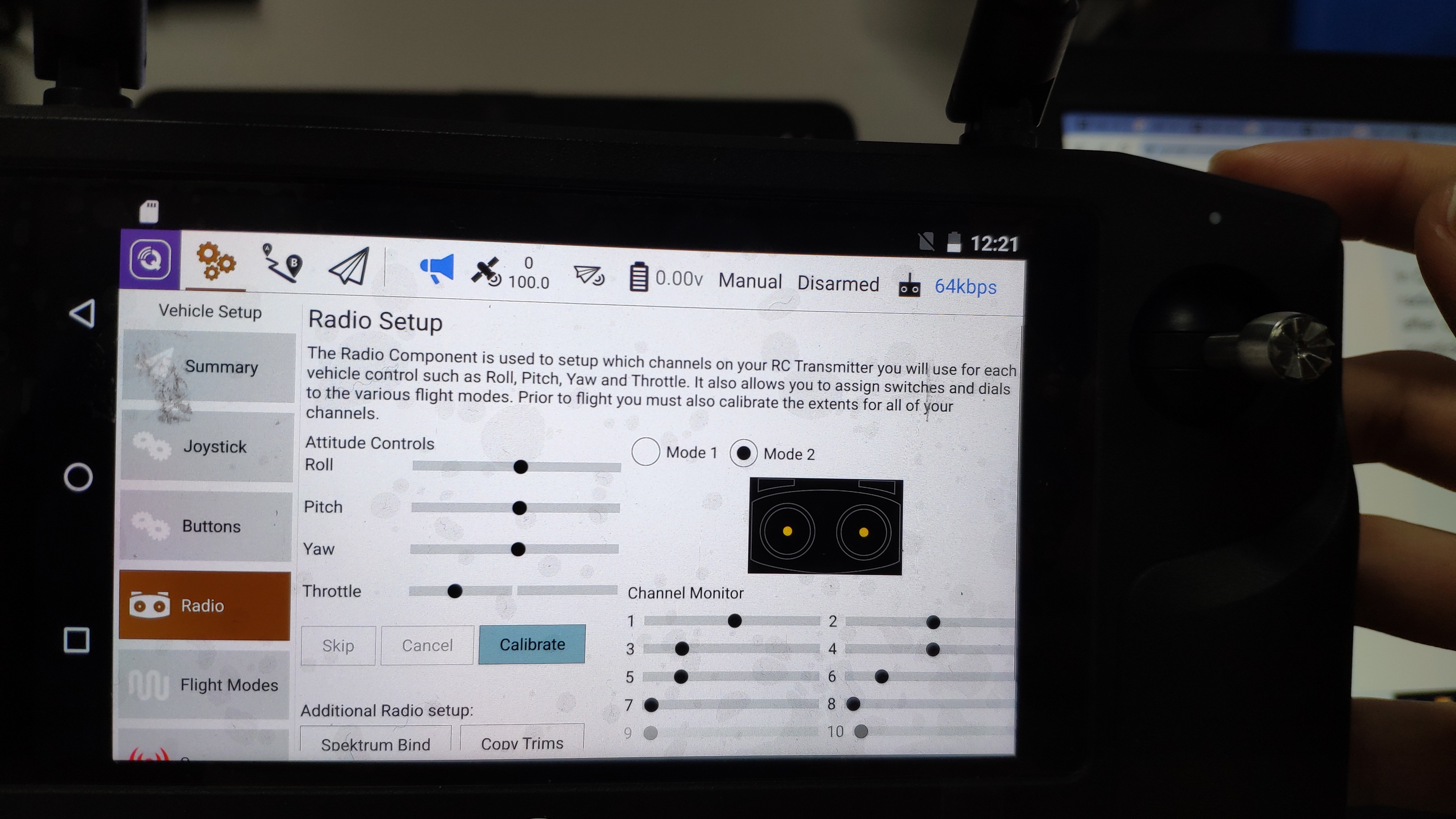
- Attempt to center the Throttle using the Herelink Controller Unit in the Radio Setup menu.
System Information
When posting bug reports, include the following information
- Operating System: Herelink Controller Unit
- QGC Version: 3.0.0-243-gd759437
- QGC build: Stock from the Remote Unit flash
- Flight Controller: Pixhawk 2
- Autopilot (with version): Pixhawk 2 with ChibiOS on Rover with CubeBlack 4.0.0
Detailed Description
Beyond the details above it should be known that prior to the last flash this unit functioned as expected with respect to the throttle control.
Log Files and Screenshots
- https://discuss.cubepilot.org/uploads/default/original/2X/9/9623d46adf7667d75e3852518250ab67d544fb28.jpeg
The above image shows the position of the throttle with no pressure applied to the stick. This is not my picture, but the location of the dot is just like what I experience with this unit.
{kind=link}