This is a new build so it’s got limited time on it. A bit of a newbie with bidirectional dshot, but I’ve noticed rpm dropouts every so often and just marked it up as a reporting issue as the corresponding rc outs didn’t spike. Well about the 10th flight it dropped from about 10 feet, at about a foot from the ground it recovered and seemed fine. Message console and data flash reported potential thrust loss on motors 1 and 4. Could be desync so I was going to change some of the blheli parameters. But looking at the rpm dropouts, maybe it’s something else. This picture of the dropouts is one of the first flights. The log is the actual flight with the thrust loss, only a few dropouts.
Cube Orange
tmotor 3508 380kv motors
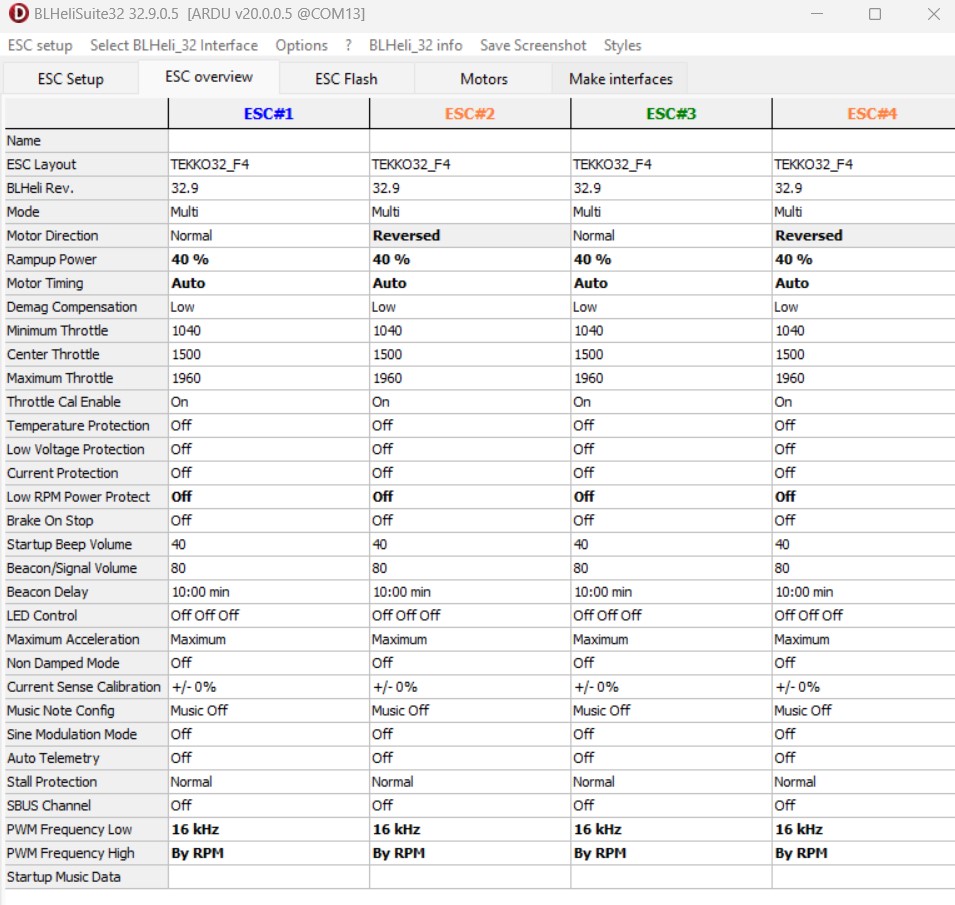
Holybro Tekko32 F4 45A ESC (latest blheli firmware)
tmotor 15" folding carbon props
6s9500mah liIon packs (built myself with molicel 28b’s)
All up weight with emlid gnss and camera, 3.25kg
A whole bunch of carbon plate, screws and stuff from the junk drawer lol.
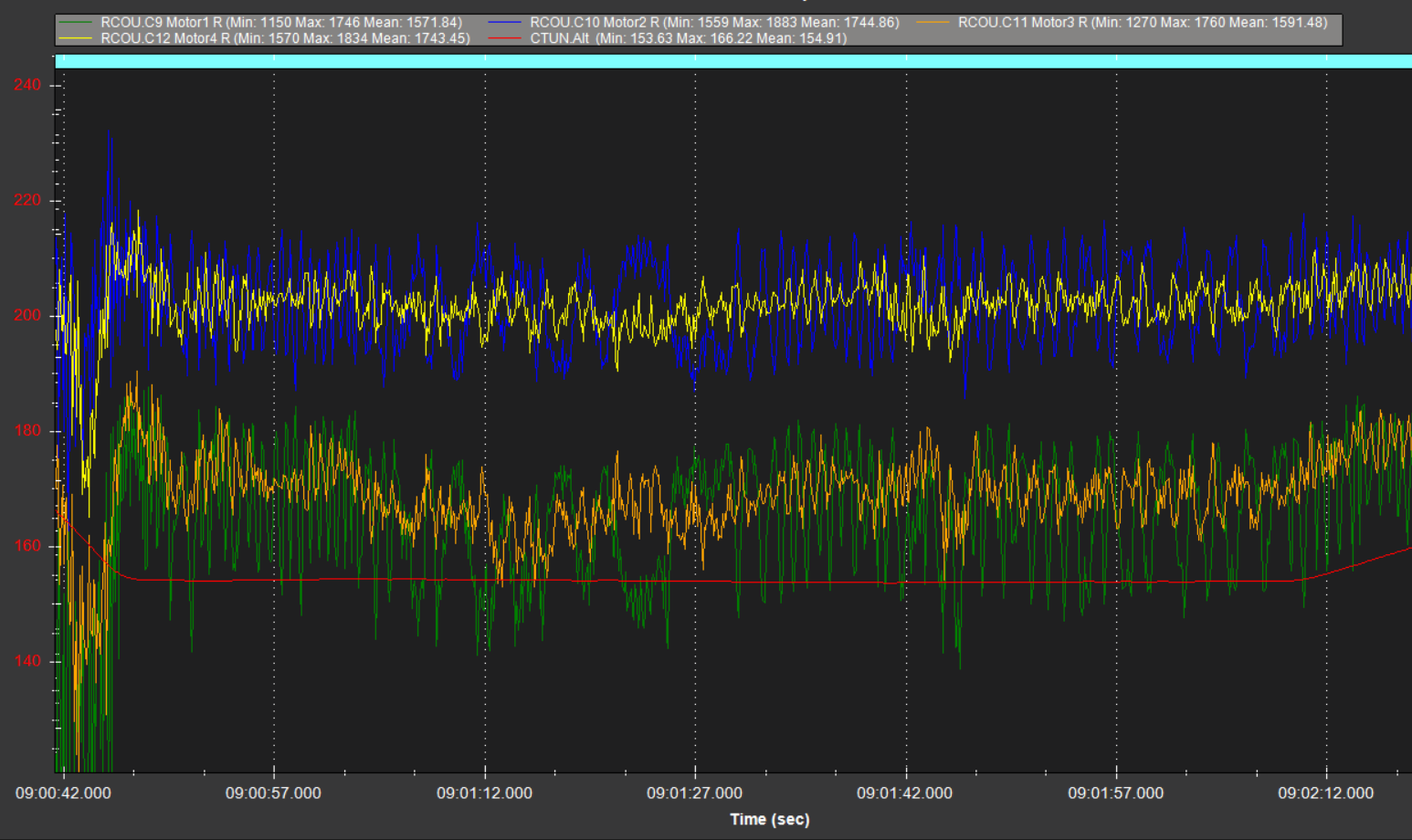
Several times in that flight motors 4 and 1 are at maximum.
Output is very high just to hover.
In the BLHELI settings I would probably turn on the temperature protection and set it to 90°C, everything else looks OK though.
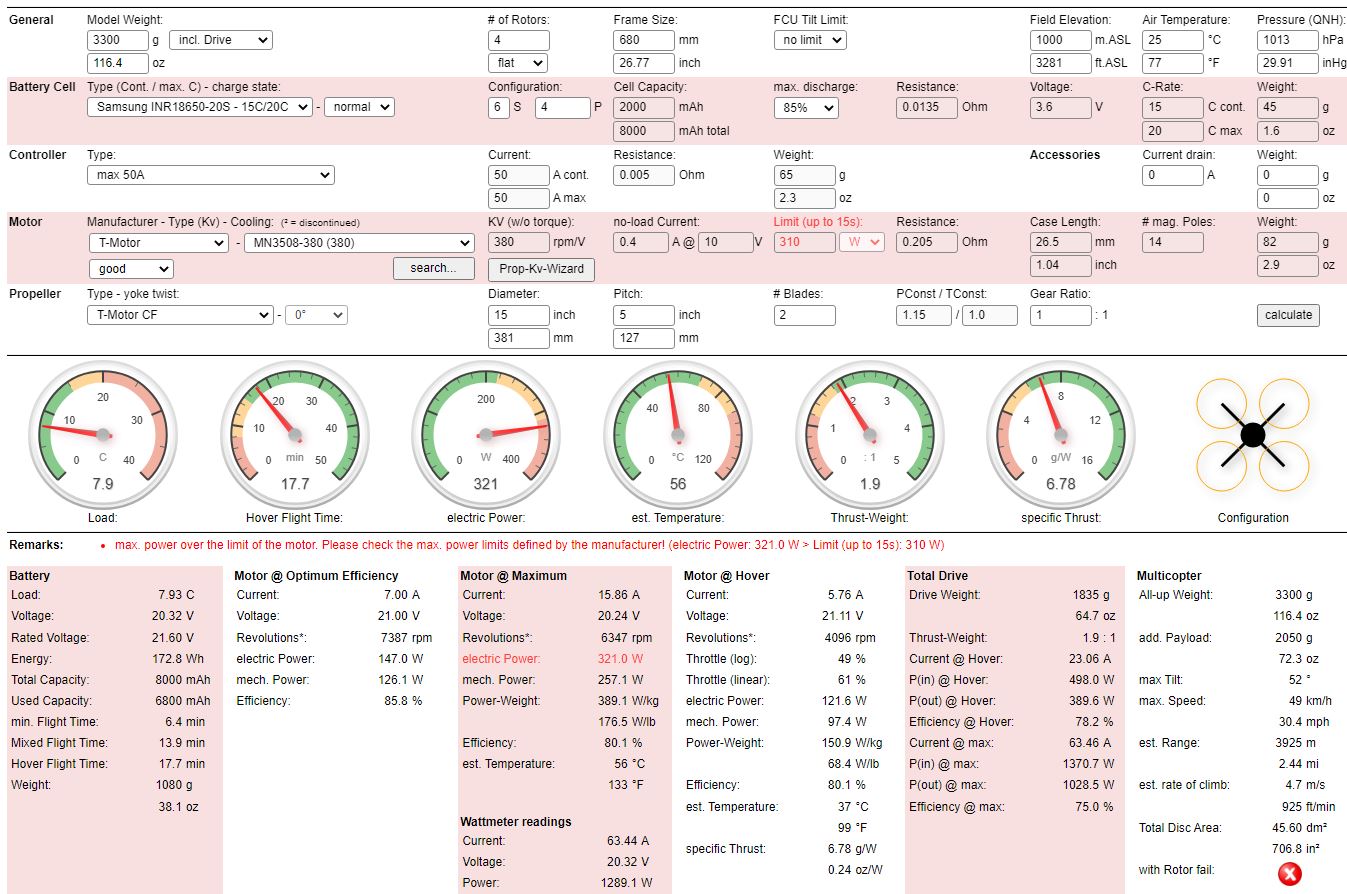
ecalc says you’ve got about a 1.6:1 to 1.7 thrust to weight ratio, supported by the logged data.
The trouble is you cant just change props to fix it, I think you are already hitting or exceeding the maximum power of the motors.
You’ll have to lose a lot of weight, down to about 2.8kg or 2.6kg, which is probably not feasible. Even with reducing weight, the electric power of those motors is still a concern.
There’s a weight imbalance too, while common, it’s not doing you any favours. Motors 2 and 4 (rear) have to work harder than 1 and 3 (front).
I suspect your MOT_THST_EXPO could go down somewhat due to a bit of instability during descent, say to 0.66, but it is hard to tell with those motors operating near maximum all the time so I wouldnt change that yet. Or at least it wont help much if you do change it.
EDIT:
In that log I only see the copter following the desired altitude and climb rates, I dont see a fall. No, actually, right at the end in Loiter there is a incident where altitude and climb rate drop unexpectedly. These and some similar deviations are where motor outputs go to maximum, or are already at or near maximum.
So motors are probably overheating, reducing efficiency, and also when needed they have nothing more to give.
I wouldnt say they look like desyncs, I think the ESCs are doing an excellent job under the circumstances.
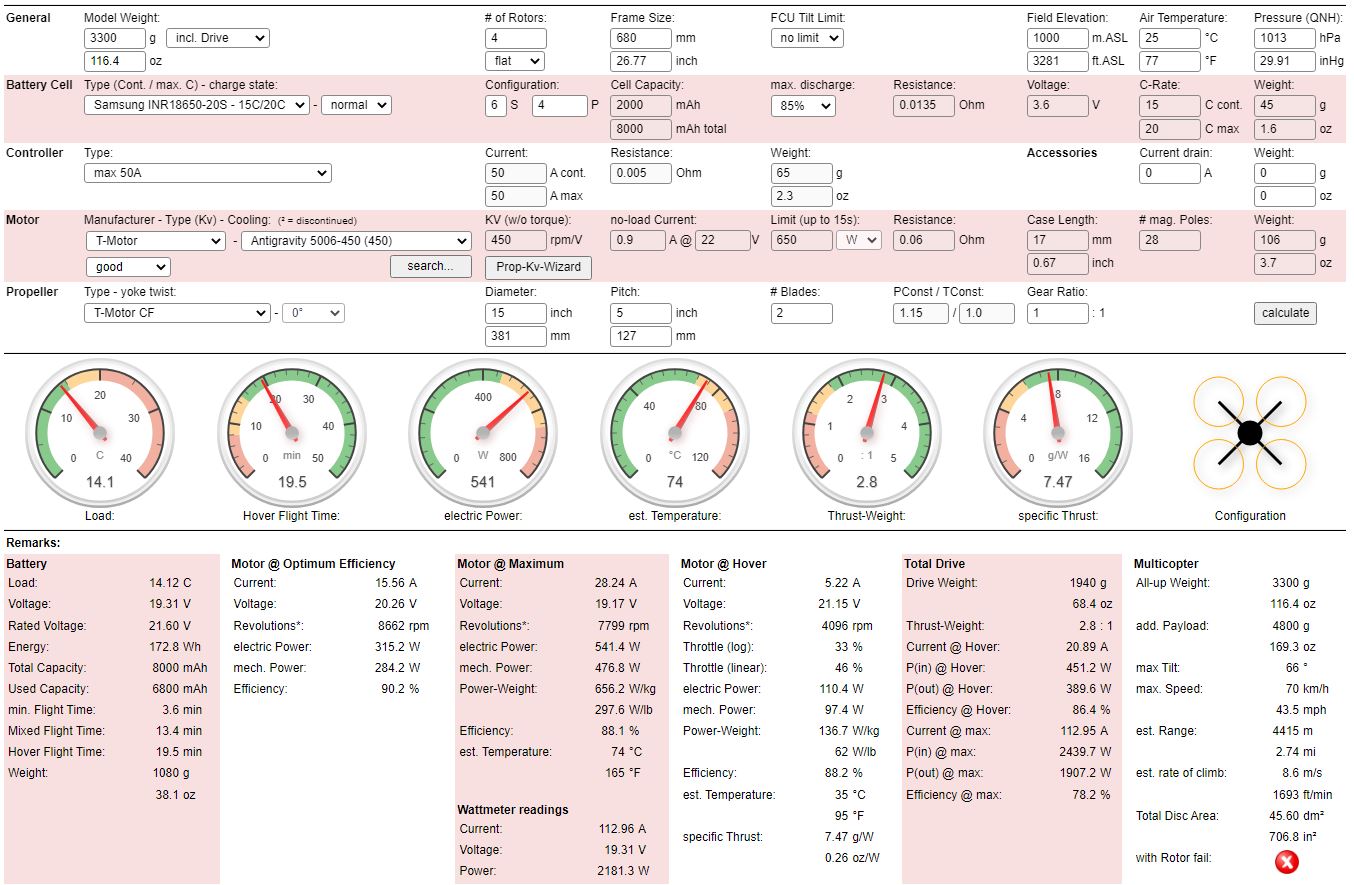
Thanks for looking at that Shawn! The motors are a bit disappointing. I’ve flown this setup for maybe 6 years at about the same weight. For the new frame I decided to use new motors and esc’s given the number of hours on them mapping. The Tmotor 3508 340kv is supposed to have a max thrust with their 15" props of 1880g. Not the first time Tmotor has stretched the specs (my old U8’s come to mind lol). A lot of the weight comes from the F9P Holybro’s for heading yaw and Emlid M2 gnss for photogrammetry. Oh, and a parachute doesn’t help. I think you’re right about the motors running too hot. That day it was 35c at 1000m. Those motors were working hard. Looking at the desired roll and pitch compared to actual, the tune tracks really tight at the start of the flight. By the end it’s looking pretty loose. Maybe I should adjust the voltage scaling on the lower end (but may actually make the heat issue worse). I did put another 17 flights on the next day and it seemed fine. The roll and pitch logs still show the sloppy tune at the end though. I’m going to try some new motors. Tmotor has a Antigravity MN5006 KV450 that will put out about 3200g of thrust. So once I factor in the Tmotor cool-aid numbers it should be around a 2:1 ratio. Same weight and current draw at the 450kv (close) with the same 15" props. I’ll have to remember to change the esc’s from 14 to 28 pole of my notch filter is going to be confused. I was wondering about blheli’s PWM frequency could be causing the heat issue. This is a new function for me. I set the low for 16kHz and by RPM for the high.
In BLHELI the Motor Timing should be Auto, in fact all defaults except:
Low RPM Power Protect = OFF
Low Voltage Protection = OFF (rely on the flight controller battery settings)
Temperature Protection = 90
Motor Timing = Auto
Those PWM frequency settings wont need altering from defaults. It’s not the PWM frequency that is having anything to do with the motor heating or operation - the motors are just being asked to operate near 100% all the time.
In BLHELI I also use the Sine Mode feature, not many people do, so its up to you. I’ve run it on motors with high load, higher take off weight (by over double) than they were expected to cope with, and never had an issue.
I haven’t used ecalc in years, I should have renewed before buying another set of Tmoto 3508’s lol. I think the Antigravity 5006 450kv will fix a lot. Now, does anyone want to buy some almost new 3508 motors?