done flight after correcting connections kindly check
OK the voltage and current monitoring are working correctly now - provided you used the voltage multiplier and Amps/Volt values provided with that Mauch sensor.
This is more important that some people expect and great for diagnostics.
Now you can continue tuning with more confidence.
Attitude control is a little wobbly but not too bad. OK considering there are still default values for most things.
There is a definite physical yaw bias, like motor mounts or arms are slightly twisted. You can see in this graph the counter-clockwise motors have to work harder to oppose this effect.
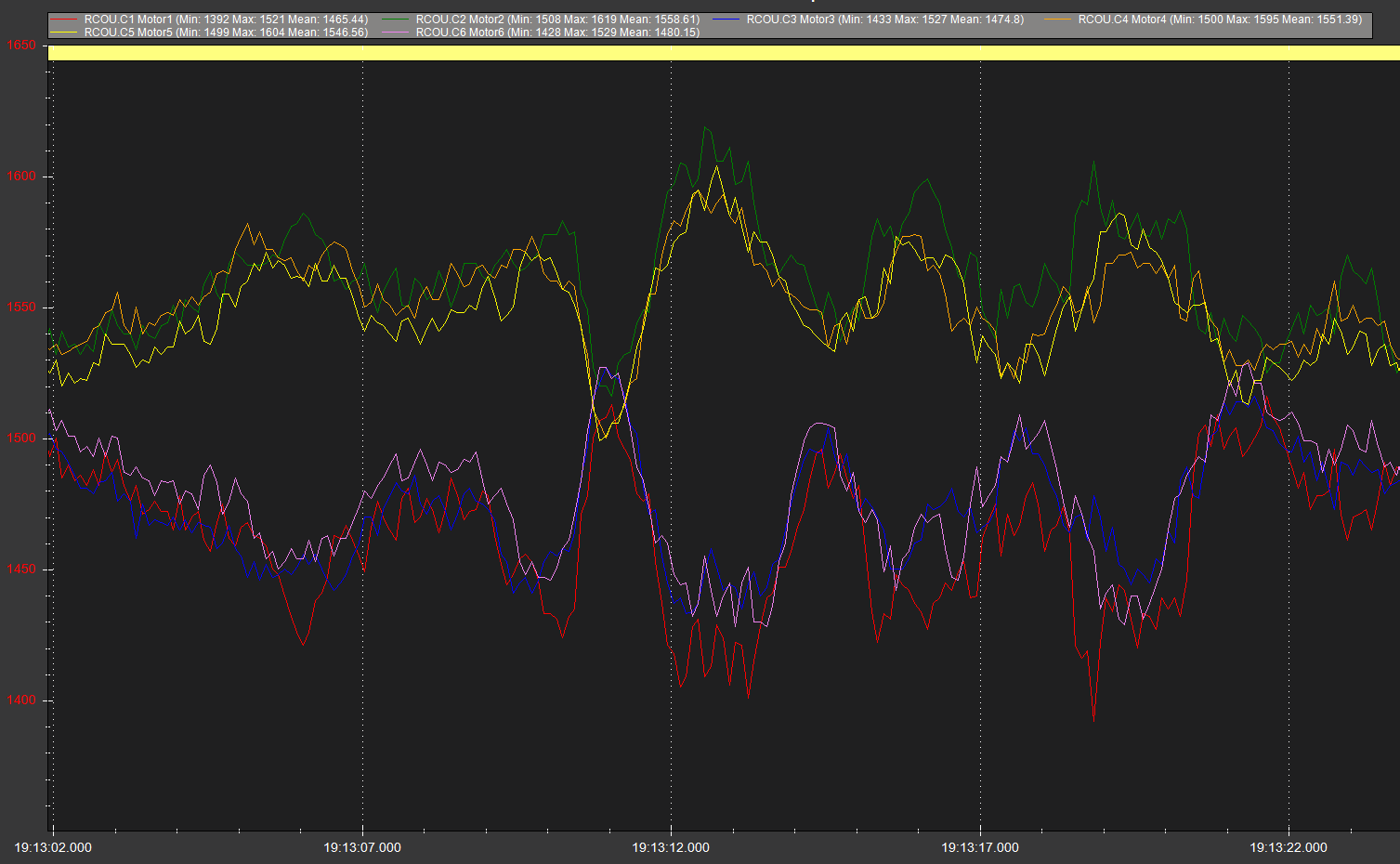
If you can fix that, slightly adjust these, and do another test flight to verify them
INS_HNTCH_FREQ,48
INS_HNTCH_REF,0.22
INS_HNTCH_HMNCS,1
In you next test flight include AltHold and Loiter, and some yaw and circles.
I think you would be able to run Autotune and this copter would be ready for some proper flying.
flight mode loiter
thank you for your help kindly review the log file
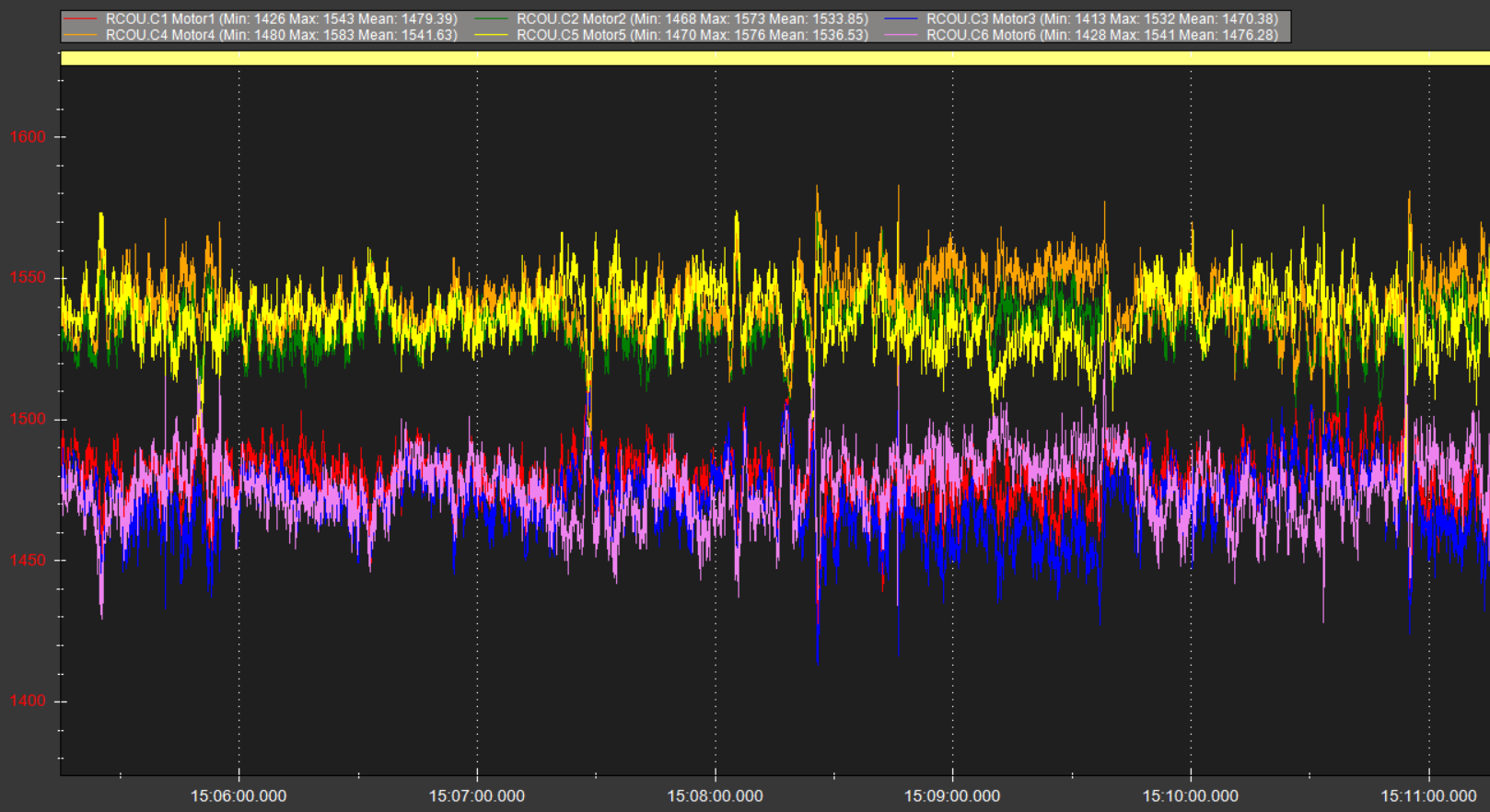
You can see there is still some motor mount twist
The easiest way to see this is look at the props from the side, and you are looking for a prop spinning on exactly the same plane as its neighbours.
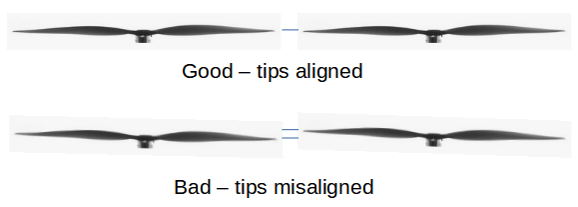
Is there some way to adjust the twist of the motor mounts or arms? Maybe even swap all the arms around into different positions until you have the best possible alignment, then check you prop fitment and motor spin directions with MissionPlanner motor test.
You can set these to refine the compass calibrations, which will finally solve the heading of this thread ![]()
COMPASS_OFS_X,88.7608
COMPASS_OFS_Y,-319.3698
COMPASS_OFS_Z,1010.7549
COMPASS_MOT_X,-11.3836
COMPASS_MOT_Y,25.7464
COMPASS_MOT_Z,-53.8523
COMPASS_SCALE,1.0091
COMPASS_OFS2_X,-113.5197
COMPASS_OFS2_Y,44.3052
COMPASS_OFS2_Z,20.9772
COMPASS_DIA2_X,0.9937
COMPASS_DIA2_Y,0.9825
COMPASS_DIA2_Z,1.0238
COMPASS_ODI2_X,-0.0103
COMPASS_ODI2_Y,-0.0427
COMPASS_ODI2_Z,0.0151
COMPASS_MOT2_X,15.6119
COMPASS_MOT2_Y,-17.6275
COMPASS_MOT2_Z,5.3148
COMPASS_SCALE2,1.0241
COMPASS_MOTCT,2
And these for some general tuning:
ATC_ACCEL_Y_MAX,20000
ATC_RAT_YAW_I,0.030
ATC_RAT_YAW_P,0.30
ATC_RAT_PIT_FLTD,10.5
ATC_RAT_PIT_FLTT,10.5
ATC_RAT_RLL_FLTD,10.5
ATC_RAT_RLL_FLTT,10.5
ATC_RAT_YAW_FLTE,2
ATC_RAT_YAW_FLTT,10.5
You can copy/paste all those onto one notepad/text file and save it as updates.param and load it via MissionPlanner full parameter list, “Load from file” at the top right of the screen.
You should be able to run Autotune on pitch and roll then - it should be a good result. You can do yaw later, it’s not as critical but will be nice to get
done flight with above mentioned parameter,
after flight it was showing high magnetic value error.
There’s no flight in that log but I see the prearm mag field message.
Disable the first (inbuilt) compass: COMPASS_USE,0
my bad downloaded last flight after reboot sending bin file
These adjustments should sort it out
COMPASS_USE,0
COMPASS_OFS2_X,47.23567514629954
COMPASS_OFS2_Y,61.53968465546415
COMPASS_OFS2_Z,-28.65879931210014
COMPASS_DIA2_X,0.9566203611779858
COMPASS_DIA2_Y,0.9846968585635361
COMPASS_DIA2_Z,1.058682780258478
COMPASS_ODI2_X,-0.006995078459369855
COMPASS_ODI2_Y,-0.04167548754714653
COMPASS_ODI2_Z,0.002650781362838853
COMPASS_MOT2_X,6.854828362444559
COMPASS_MOT2_Y,-6.273807701336024
COMPASS_MOT2_Z,-5.289031063125347
COMPASS_SCALE2,1.0565531948549436
The get into the Autotune steps I mentioned
done flight with adjusted parameter kindly review the file
From a compass point of view that is fine how you have it now.
You probably just need to run an Autotune to clean up the Attitude control a bit.