done flight in loiter mode
kindly review
Looks good
Just set these then run Autotune on each axis (dont worry about doing Yaw D)
ATC_THR_MIX_MAN,0.5
FENCE_ENABLE,1
INS_HNTCH_FREQ,46
Seriously, every copter bigger than your hand should have Fence enabled. Especially these ones with lots of big props. You dont want this trying to take off sideways, or disappearing over the horizon.
Some people rely on arming in Loiter mode which has the same effect, but having the Fence enabled takes out any human error.
We’ve had some poor GPS days where we could just NOT get a good home position and had to disable Fence to get airborne - and I worry about it the whole time ![]() having seen what a big carbon fibre prop can do to steel (what steel? was there steel there?)
having seen what a big carbon fibre prop can do to steel (what steel? was there steel there?)
I enable the Fence again as soon as possible!
I will enable fence next time and share the log file with listed parameter after another flight
thank you for the suggestion.
I have done autotune but unfortunately it was not successful
then i done another flight in loiter mode to test the stability
kindly check the log file
Couldnt access those files, you seem to have deleted them
wait
You current sensor is not working correctly, only showing 0.4 amps during flight which would make this a nano-machine.
Also this seems very wrong: BATT_VOLT_MULT,936.0623 even though the voltage appears roughly correct. That’s essentially an impossible number in this scenario, as if there’s an air gap between the voltage sensor and the battery.
Do you have photo of you voltage and current sensor, and wiring to the flight controller?
Make, model if not a standard unit that came with a Cube?
For attitude control you could try:
ATC_ANG_PIT_P,6.0
ATC_ANG_RLL_P,6.0
But I would not be flying more until you’ve got the whole voltage and current issue sorted out properly. These are vital measurements needed for safe flight.
Mauch 085: 4-14S BEC (HS) for pixhawk 2.1
I’m using this sensor since we are using 12S battery and power brick which come with pixhawk cube support up to 6S only
The wiring or something is drastically wrong, draw out a diagram of how everything is wired (exactly) and send a couple photos
SENDING BIN FILE.
KINDLY REVIEW
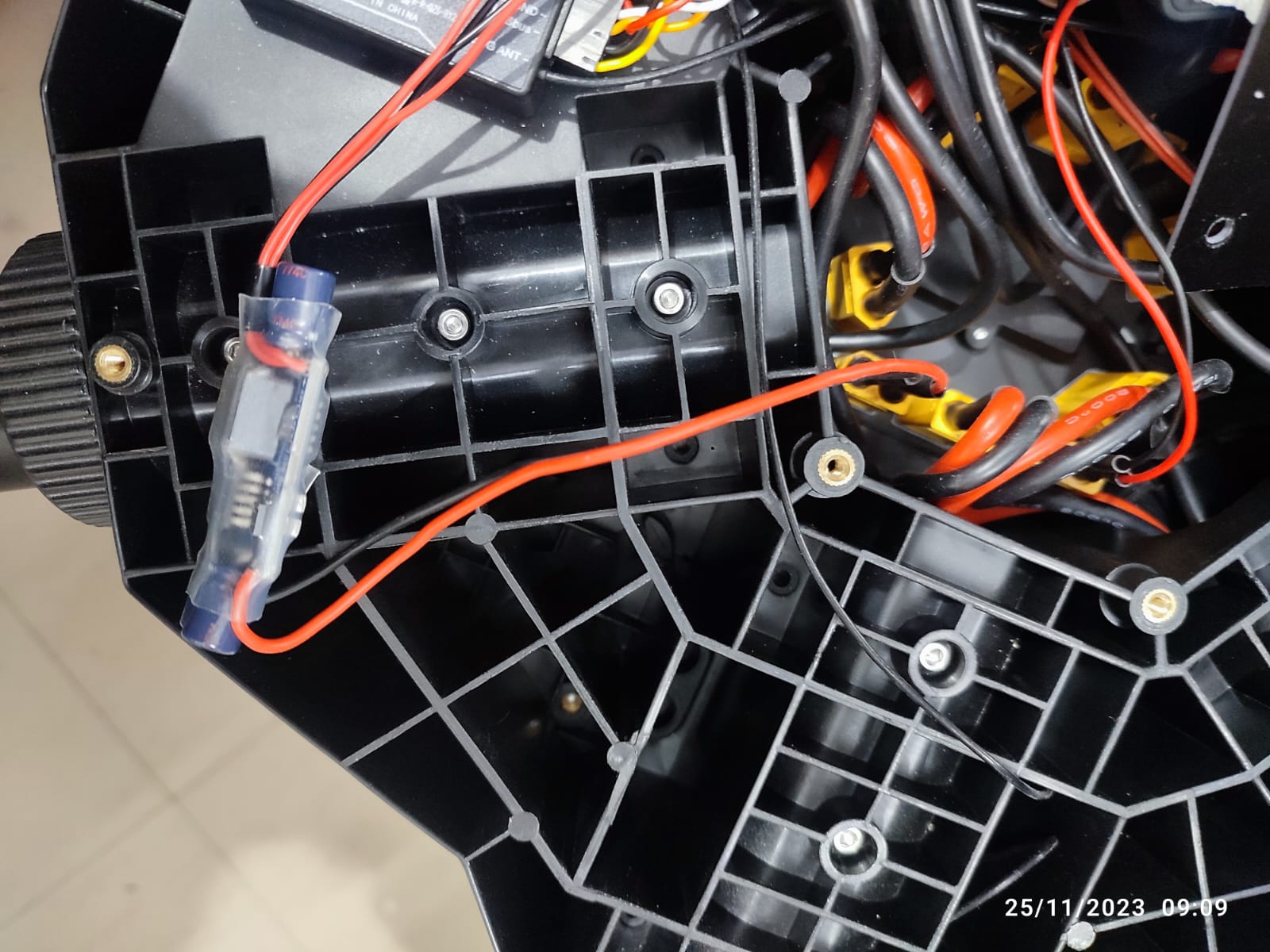
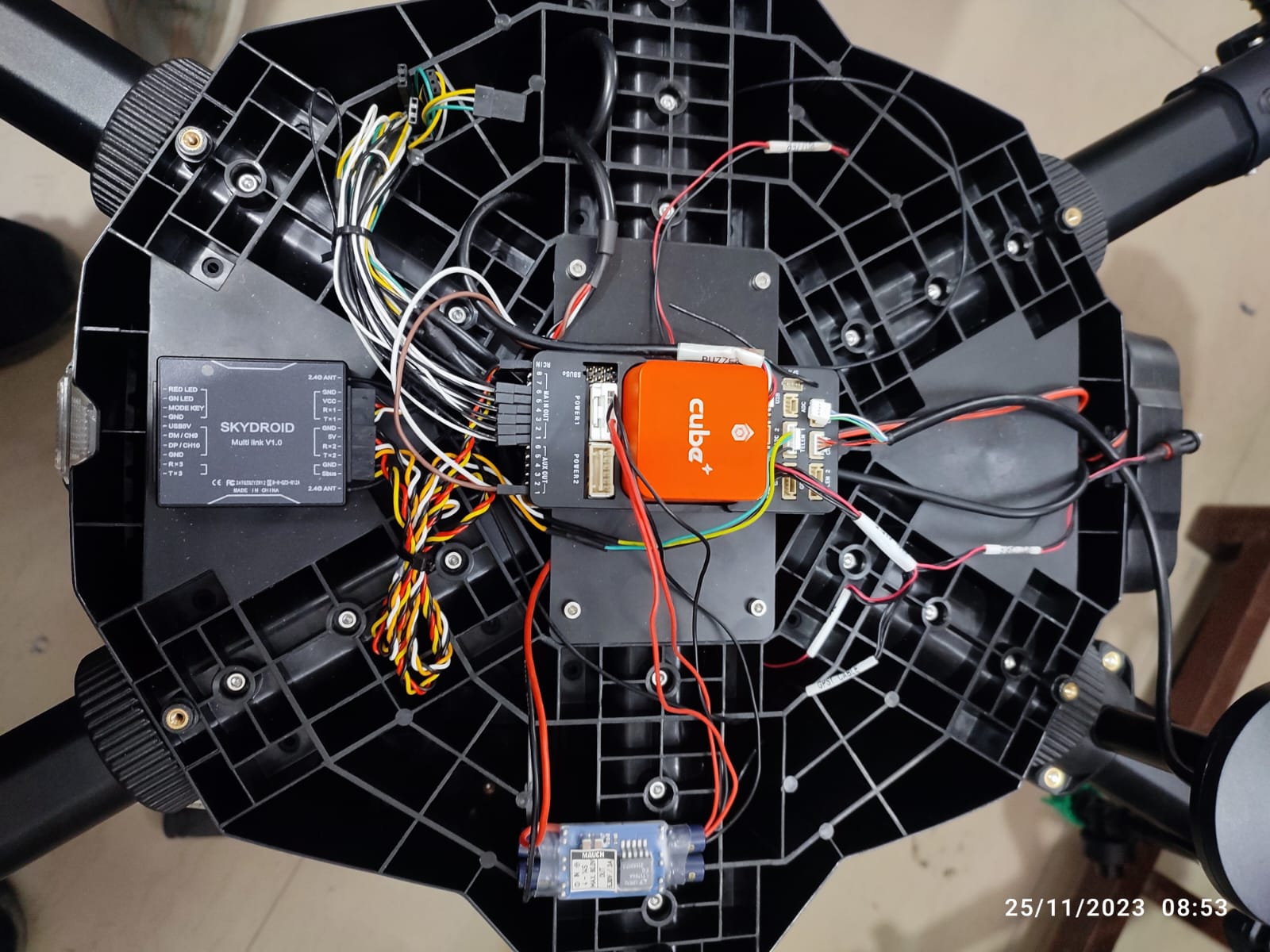
All the wiring needs to be secured to the frame, so it does NOT move around and vibrate - because it most definitely will. Every part such as the BEC or radio receiver needs to be secured.
The wiring needs a small length of flexibility where it plugs into the flight controller so it wont transfer vibrations, or the weight of the wiring wont pull on the flight controller.
There is NO voltage or current sensor in that picture! I was right about there being an air gap between the voltage sense pin and the battery - and I was only half joking!
What you picture there is a Mauch backup BEC, which is an additional supply to the Cube. You need a primary supply with voltage and current sense.
Integrated current and voltage sensor
kindly review ,current and voltage sensor is working fine or not
Mauch 076: HS-200-HV ,200A------ MODULE NAME
The current sensing is not working properly.
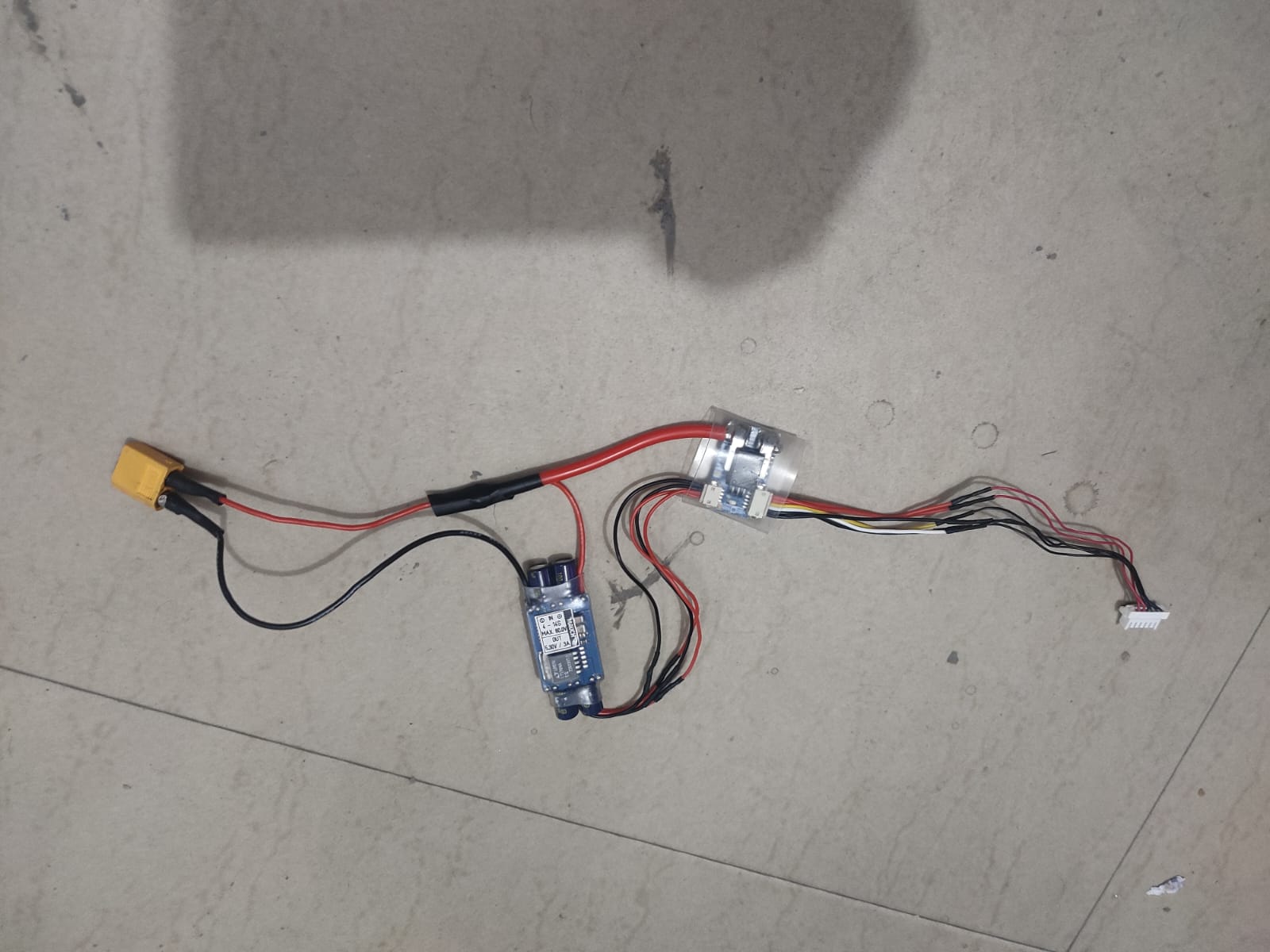
Draw a diagram of how you have this connected.
If it is connected like that, it should be working fine - but it’s not.
Can you supply a photo or two?
XT60 CONNECTOR IS ATTATCHED TO POWER DISTRIBUTION BOARD WHICH COMES INBUILD, AND CONNECTOR IS CONNECTED TO POWER 1 PORT OF PIXHAWK
KINDLY CHECK
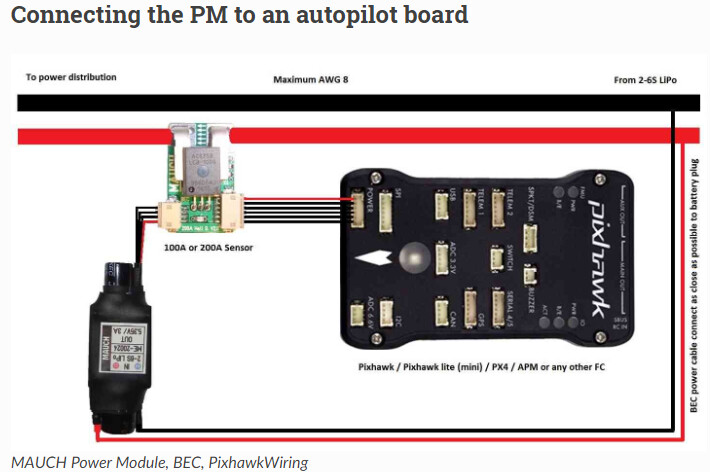
This whole assembly needs to be inline between the battery and the PDB.
Pay attention to the tiny arrows on the voltage/current sensor. Go back and look carefully at that diagram you posted, and have a careful rethink of your wiring.