@Michael_Oborne @philip My drone crashed from 100 meter height please any one check my log files tell me the reason
https://drive.google.com/file/d/1Z2J-ugnyZe6qHk734LqMNP7plDCTAkiW/view?usp=sharing
I have uploaded files in above link
Any reason why you are using AC3.6.9?
First, (after recovery/rebuild) upgrade to the latest stable release, 4.0.3 at the moment. There’s numerous very important fixes. Also make sure MissionPlanner is updated and it will warn of particular hardware problems if they exist with your Cube.
Logging continues right till the point of impact. The cause is radio issues and the fact that you’ve got the throttle at zero the whole time. This is fine in an auto mission, except if you’ve got to take control !
With the RC throttle at 0 (1000us PWM) you switch to Stabilise mode and the craft does exactly what it’s told: motor output to minimum and there’s no attempt to save it.
You can see the battery voltage rise as electrical load drops off and current goes down - the motors are doing almost nothing (compared to normal flight).

I’d suggest changing the transmitter to spring-centre the throttle and set PILOT_THR_BHV,7 after the firmware upgrade.
Fix whatever is causing all your RC receiver issues.
You had a fairly severe imbalance in motor outputs before the crash - I guess it will be worse now - sorry 
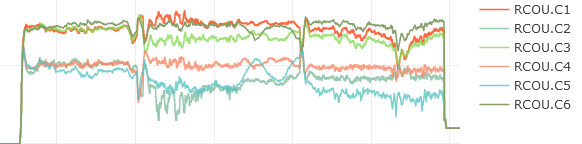
This indicates Clockwise motors have to work very hard to counter a physical yaw imbalance, like twisted motor mounts. This wont leave much headroom for stability and can lead to crashes too.
1 Like