Hello!
We are looking for a programmer who would integrate a new frame type with the Ardupilot.
The UAV has a layout, which is shown in the graphic below:
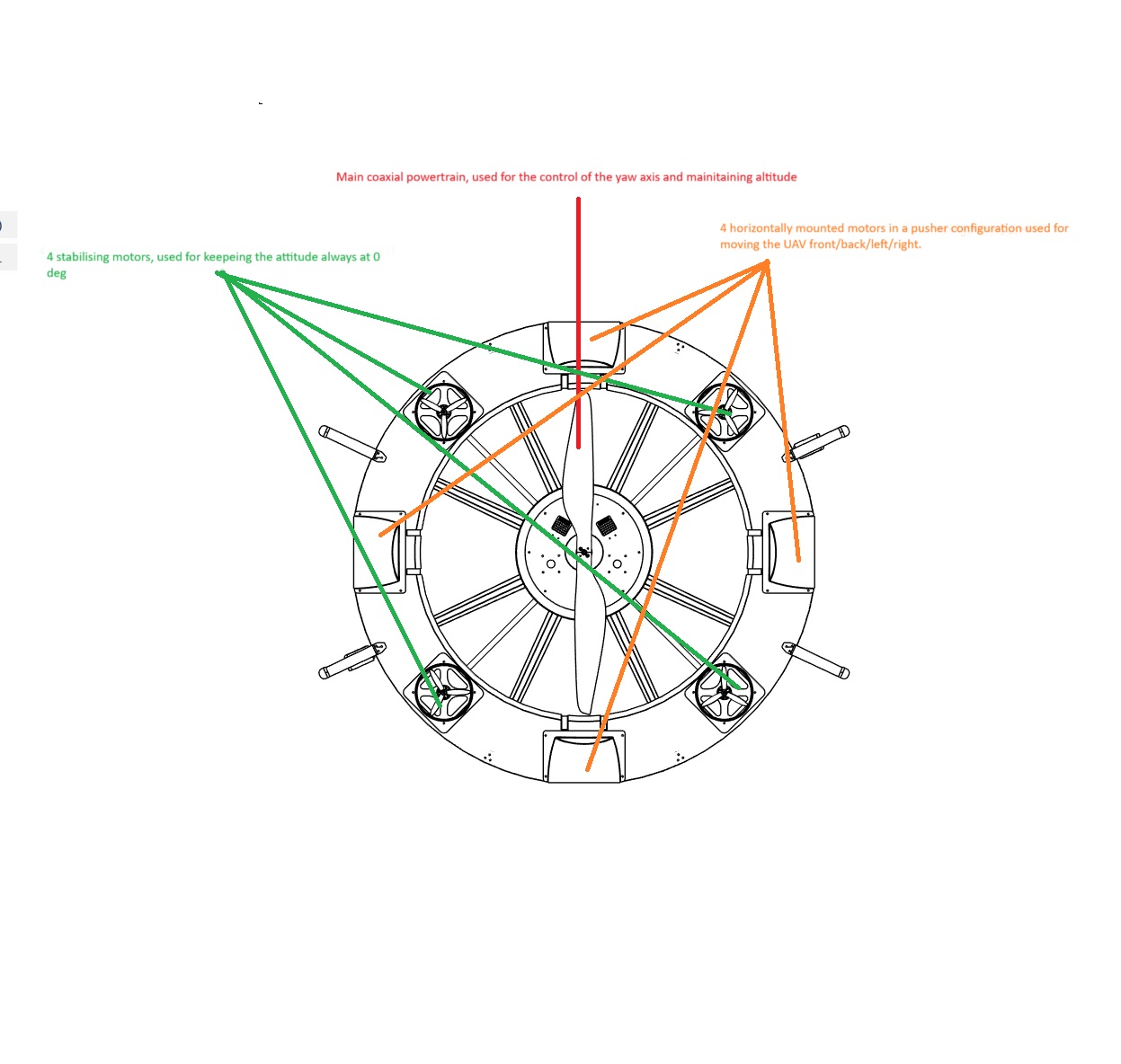
It uses 2 big motors in a coaxial configuration to generate main lift. One of the motors is rotating CW, another CCW, differentiating their thrust allows for the control of the yaw axis. The 4 vertically mounted motors are used as flight stabilizers, 2 of them are rotating CW and two of them are rotating CCW. They are positioned in the true X configuration. Their job is to keep the UAV constantly at 0 degrees angle. The 4 horizontally mounted motors are mounted in the plus configuration and are pushers allowing the UAV to move forward, backward, left, and right without tilting.
We need changes to the Arducopter firmware that would allow this UAV to:
- Fly in altitude hold, loiter, guided, and auto flight modes,
- use at least 3 different mot_spin_min and mot_spin_arm values for different motor groups (or different motors) (so that when the UAV is armed only the main and stabilizing motors start, and the motors used for movement are still not turning [which is achieved by setting the mot_spin_min and mot_spin_arm values below the minimal values needed by the motors used for movement to start rotating). I am aware that this will degrade the loiter performance if used in a way I described but it is of paramount importance to our research,
- use 3 different mot_thst_expo values, each one for each type of a powertrain,
- switch between moving without tilting and classical moving by tilting the UAV (the change between flying without tilting and flying with tilting may be initiated via a flip of a switch on an RC controller), which we will require to tune the UAV.
The flight controller used is the Cube Orange +.
We have an FFT gyro made by Eureka Dynamics (its functionality is described in a link below: https://eurekadynamics.com/fft-gyro/) as well as a thrust stand which is capable of gathering the data necessary for calculating the mot_thst_expo values.
We are experienced (we’ve built over 100 multirotors before) in setting up filters and tuning the UAV, so we would like to be able to tune the UAV by ourselves.
Also - if there would be any problems with the modified version of Ardupilot - we need someone who will be capable of further support.
As for the salary - we would be interested in paying up to 10,000-15,000 USD for creating such a solution with additional funding for the support phase.
To contact us please send an email with your CV and estimated time needed to create a solution to: smialekpawel@gmail.com or post below this post.
Best regards,
IFODrone.