
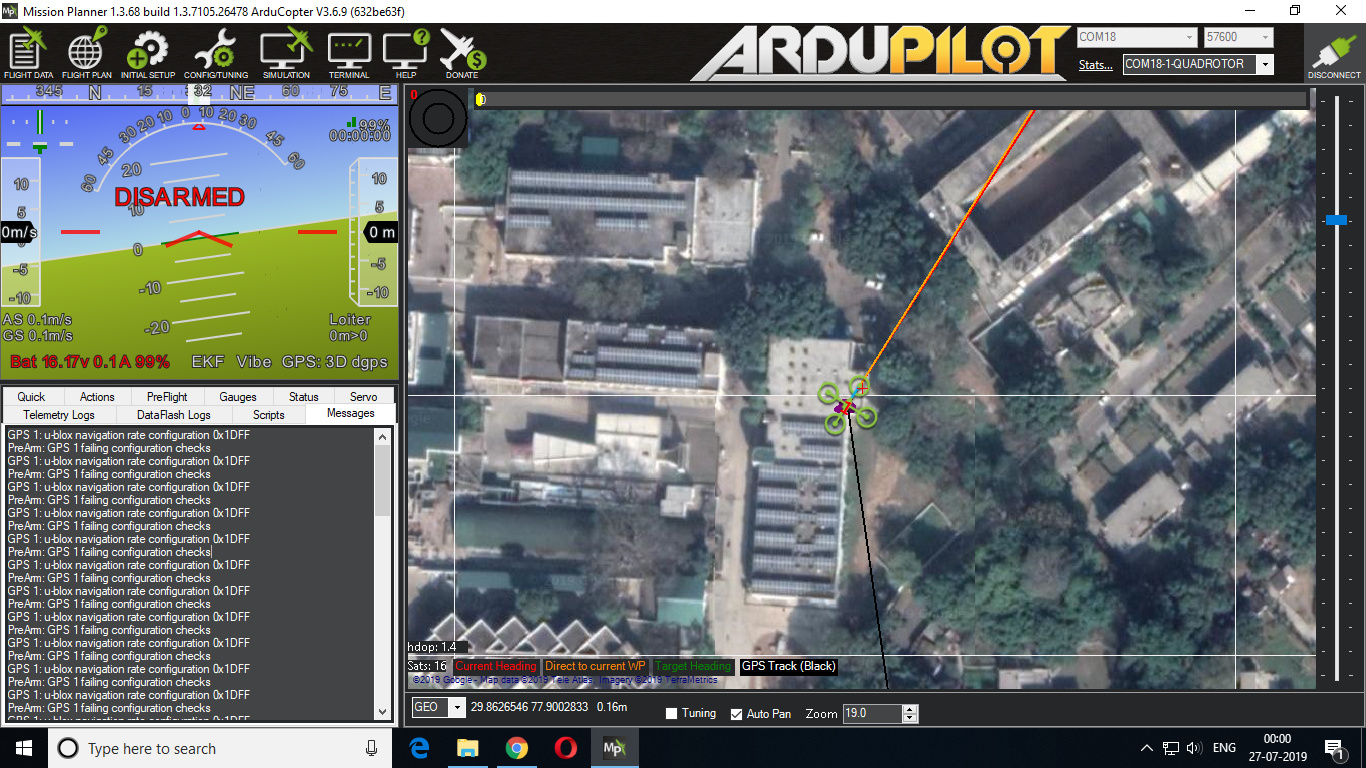
I am facing GPS1 configuration check fails when I arm my copter
Please upgrade your GPS firmware if you insist on running non CAN.
Instructions are on docs.cubepilot.org

Option is not showing to update firmware
I have tried all the method written on the forum
I want to use it as a serial GPS+I2C as it was working before
please help me
its urgent
As this is a fourm for discussion I will give my 2 cents.
Tons of work has gone into CAN & the here2.
Still there are more than a few serial port users that want to not upgrade. However, I have read a lot on this and CAN is definitely better. Serial worked in the past but not robust like CAN. The telegraph works too but not like a smart phone.
I am not trying to be a gerk just saying that you will get better data flow with CAN.
Read up on it it’s kinda exciting!
1 Like
so please share how to use CAN with here2 because my device is not working
Give full detail how to use it with Pixhawk cube
Philip wrote this…
Here2 CAN Mode Instruction
Here2 Default factory setting is CAN mode with UAVCAN Protocol. Default Here2 CAN mode has three devices on CAN bus: GPS, magnetic compass, and barometer. The safety switch is not workable under CAN mode and the barometer is disabled in CAN mode by default. The barometer can be enabled by UAVCAN parameters setting.
How to use CAN mode:
Using Ardupilot Firmware:
Current official Ardupilot firmware (Copter3.6.7, Plane3.9.6 as well as previous versions) does not support Dynamic Node Allocator, hence user needs to allocate node ID to Here2 manually. The later released Copter3.7 firmware will support Dynamic Node Allocator, user only needs to set the parameters of their flight controller to use CAN mode.
Allocating node ID method:
For allocating node ID to Here2, user needs to use Cube as SLCAN (Serial port to CAN) device, and use the latest version of Mission Planner. At first, upgrade the MissionPlanner to 1.3.63 version, please go to the link: http://firmware.ardupilot.org/Tools/MissionPlanner/ for downloading. Meanwhile the Cube which would be the SLCAN connector needs to be uploaded with copter3.7
Connect the 4p CAN cable in Here2 with the CAN2 port in the Cube controller. Connect the cube to MissionPlanner 1.3.63version and select firmware upload,
click on ‘upload Beta firmware’ to upload arducopter firmware.
If version 3.7 or later is not available, you will need to load “master” Please search the ardupilot wiki on how to do this.
After uploading successfully, click on ‘Connect’. Press Ctrl+L keys to enter into UAVCAN interface.
Click on ‘SLCan Mode CAN1’, then the information of Here2 device will show up. Click on ‘Parameters’ on the right side.
Pop up the parameters setting interface shown as the screenshot below, set the value of uavcan.node_id between 0 and 125. Click on ‘Writing parameters’, then click on ‘Commit Params’ to save the setting. With the above mentioned steps, manual Node allocation is completed. If the user would like to enable the barometer, it can be done by setting the value of BARO_ENABLE as 1.
After modifying the Node ID, the firmware can be changed into stable version.
Boot Cube controller and connect with MissionPlanner, enter into the MissionPlanner to change the parameters with corresponding values as follows:
CAN_D1_PROTOCOL:1
CAN_D2_PROTOCOL:1
CAN_P1_DRIVER:1
CAN_P2_DRIVER:1
GPS_TYPE:9
NTF_LED_TYPES:231
Writing the modified parameters, reboot the cube therefore the CAN mode can work properly.
CANBUS external compass will show up as the third compass with current Ardupilot firmware. Future firmware update will allow CANBUS external compass to be primary. Safety switch on the Here2 will not work under CAN mode. Modify the parameter BRD_SAFETYENABLE to 0 to disable the safety switch, or connect an external safety switch to GPS1 port.
Note: The later released Copter3.7 firmware will support Dynamic Node Allocator. To use the CAN mode user only needs to modify the parameters.
Using PX4 firmware:
Connect with CAN1 or CAN2 port. Connect with the controller to set the UAVCAN_ENABLE parameter as Sensors Automatic Config. The sensors should work properly.
How to use I2C mode:
Here2 also supports the traditional serial port + I2C communication. To use this mode, please disassemble the Here2 housing, Put the lever switch for CAN and Serial+I2C to Serial+I2C position shown as below.
Note… of all carrier boards made before July 2019, CAN 1 and 2 are mixed
You can tell the difference, because “NEW” carrier boards have the word “CubePilot,org” on the side, we apologise for this long standing issue. It is now Fixed and CAN1 = CAN1 on all boards with the new marking.
1 Like
This is not working , PreArm: GPS 1 failing configuration checks error coming
when I change to i2c mode
What is 3.7 firmware, share link from we can get it ?
but when I connect in CAN mode mode third compass is not detecting
http://firmware.ardupilot.org/Copter/latest/CubeBlack/arducopter.apj
I gave you the wrong link
is this working in i2c mode
You have old firmware on your Here2
You must enable CAN compass
Third compass is not working in i2c mode
I am going to tap into this topic, as I am as well unable to update one particular here2 of mine. I already have 5 others, and I was able to update them all.
So I just updated the cube to the latest master and MP to the latest beta. It took me a lot of tries to get the SLCAN to connect (of course CAN_ parameters on cube are set correctly. Cube is the same I had been using to update my other here2).
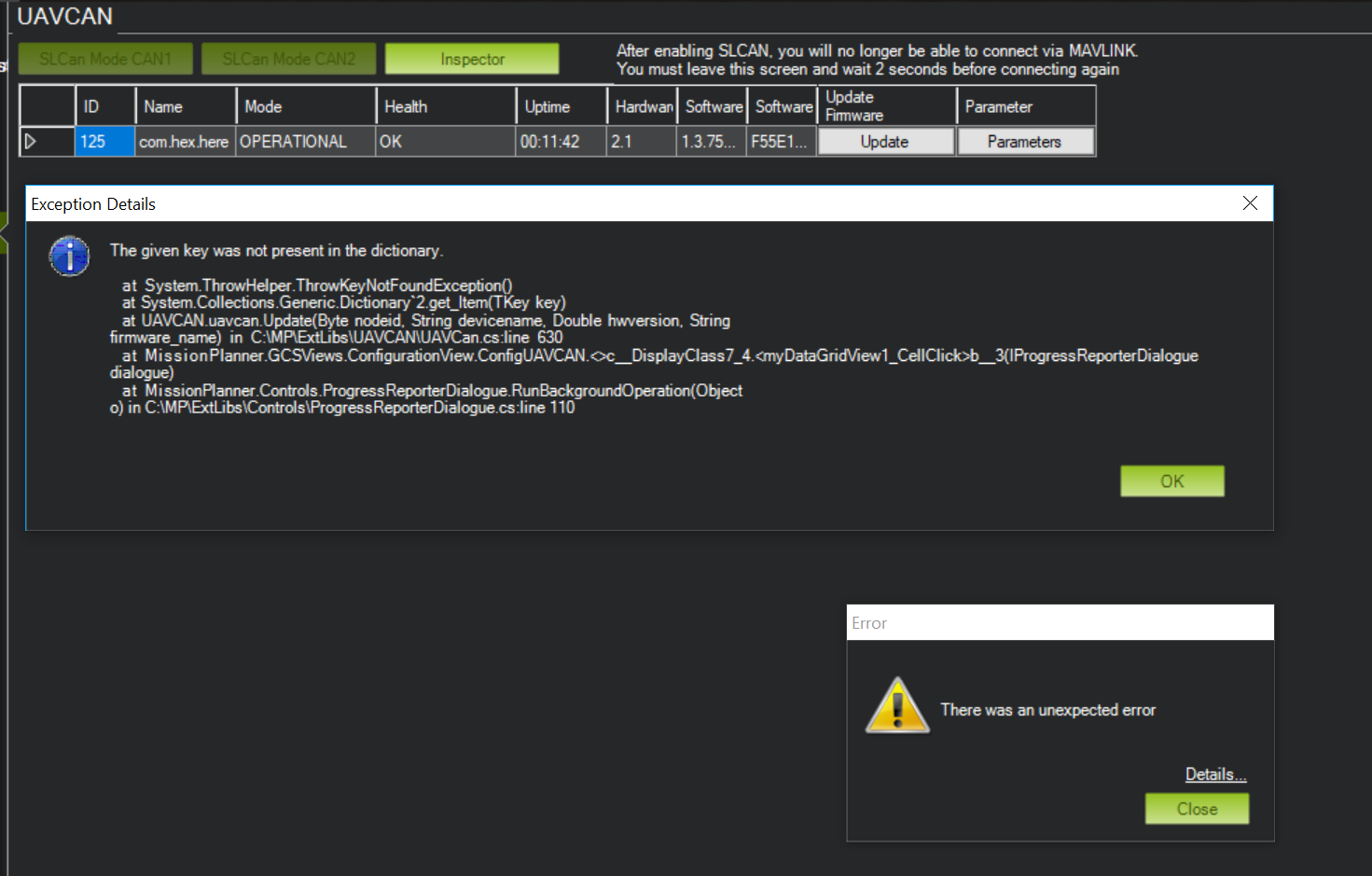
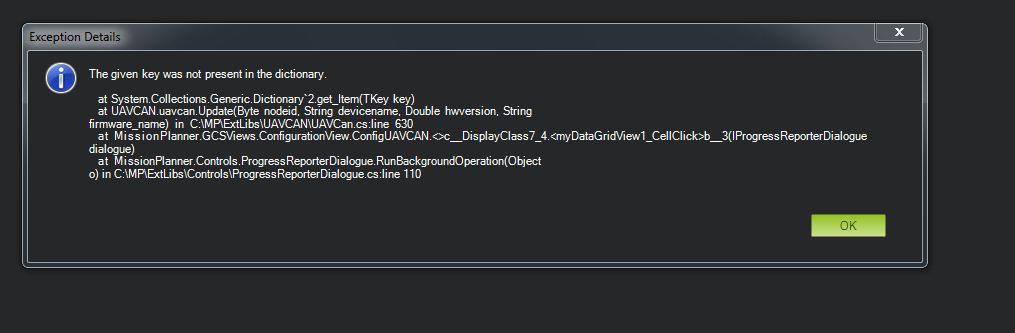
When I try to upload either the bootloader or the fw, I have the following error:

Try updating mission planner beta, there are a lot of changes going in on Ardupilot CAN, and SLCAN at the moment as we prepare for 4.0 release
Ops wrong thread.
This part is working, the issue is when I try to update the firmware.
You can see on the screen versions.
commit 8d2a624fccdc85086d8da1885b53c3dea868c18a
Author: Matt Lawrence lawrence.matt@gmail.com
Date: Sat Sep 28 01:41:56 2019 -0400
APMVERSION: ArduCopter V4.0.0-dev

I’m out now but are you sure your not on the latest version I can’t check the numbers this second, I’ll check mine in an hour or so.
I’m sure I got that error when it was already updated.
Ok I have checked and you are on the same as me and as far as I am aware thats the latest firmware that is
Software Version 1.3.75886496
SoftwareCRC F55E1B35C948A445
If you try to update you will get that message your getting as im also getting it but I believe this is the latest firmware.
Jus to confirm here is my error too
@philip can you just confirm this is the latest as I believe it is, This error in mission planner I can only assume is around trying to install the same version that is already loaded. @Michael_Oborne ?
Philip perhaps it may be an idea to add the current version to the docs, Ill happily do it if its correct, or a release notes section for Here 2 may be an idea. Perhaps I could compile that .