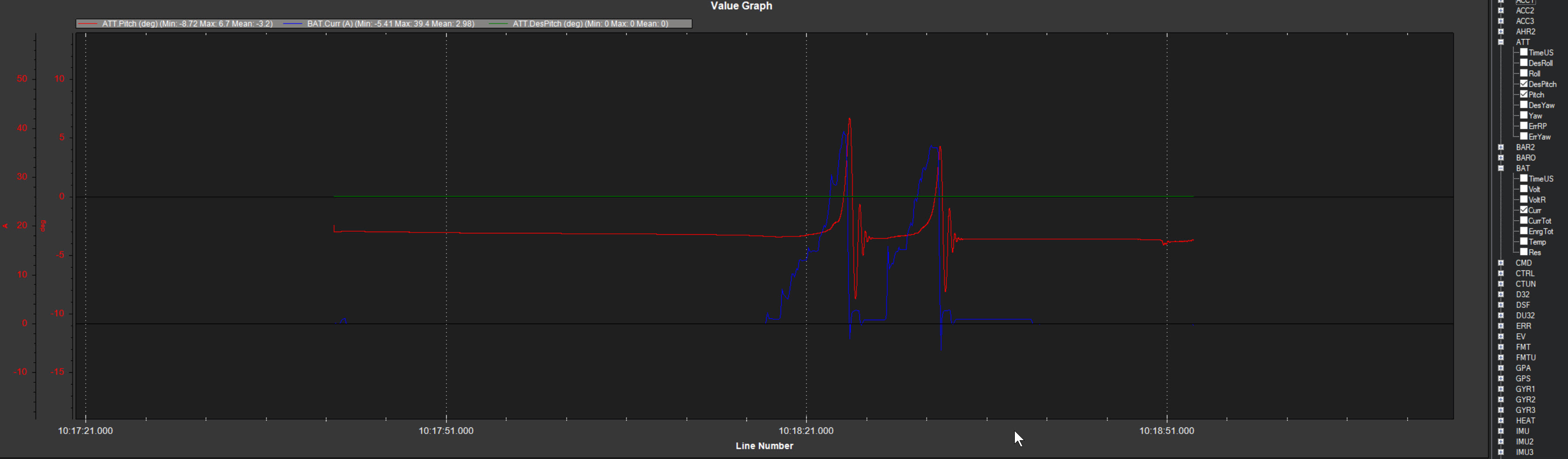
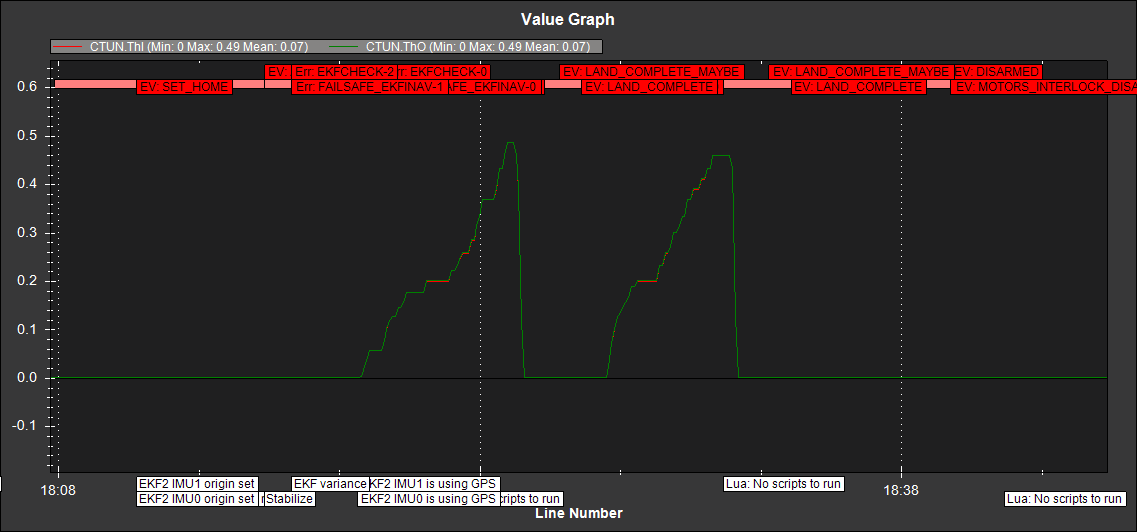
I’m testing a new custom build quad and am getting uncommanded pitch up when I apply power on the ground. It seems that I must be getting some interference due to the battery position or a hardware problem??? Here is a graph of pitch vs current
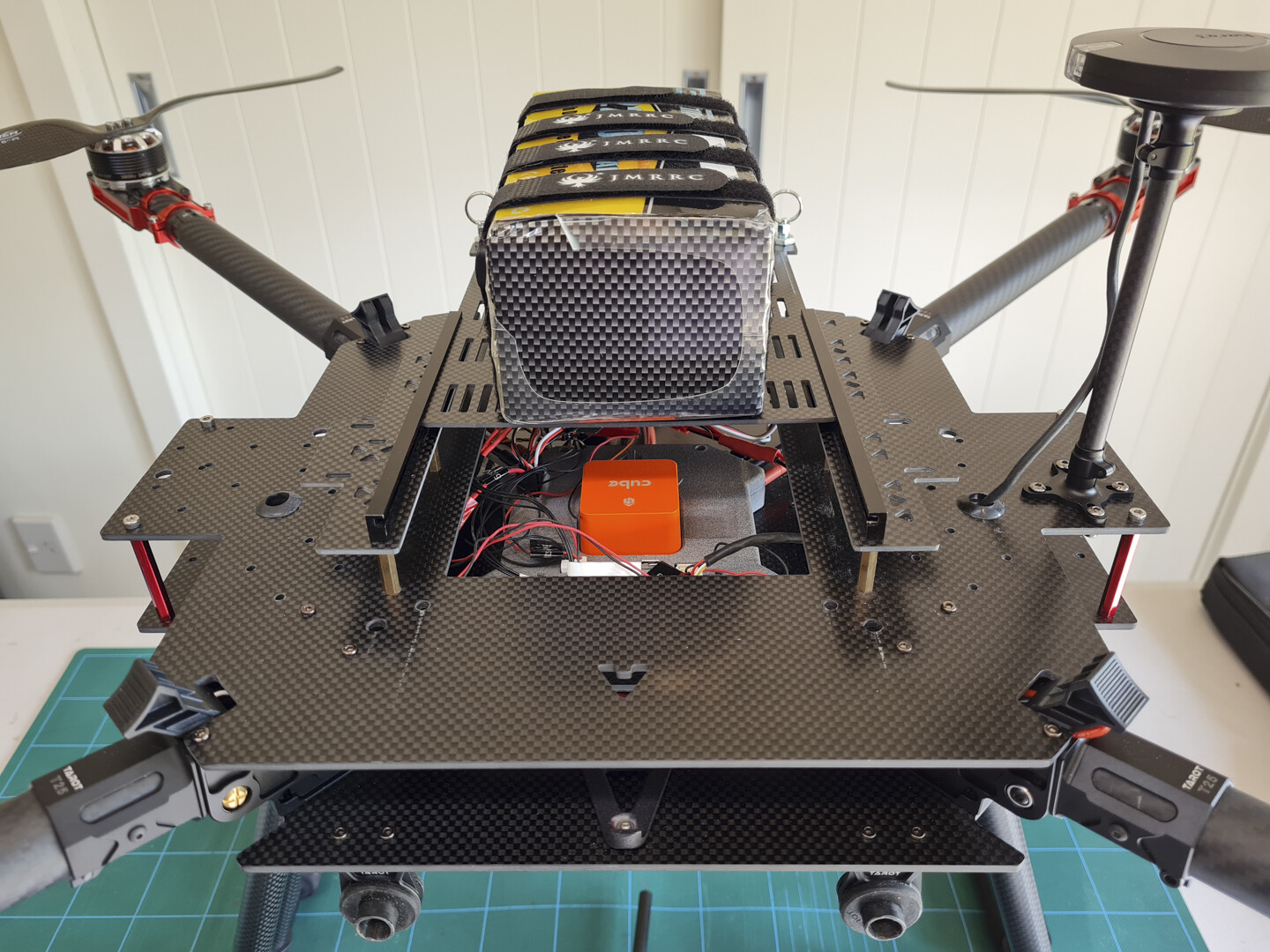
The setup is a custom quad with a Kore Board, Herelink and an Orange Cube running Arducopter V4.0.7. A 22,000 mAh battery is mounted on top of the frame and about 50mm above the cube. The internal compass has been disabled and a Here3 GPS/Compass is the primary compass. I have done a Compass/Motor Calibration and getting an interference of <5%.
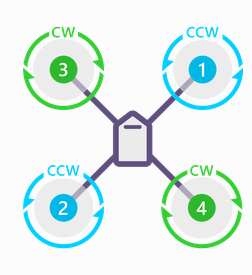
The motors are 100% mounted in the correct order and are spinning the correct way!
The log is of the quad sitting on the ground and power applied (twice) then reduced. The quad pitches up and would topple over if further power was applied.
So I think you accidentally moved the throttle stick, causing the copter tried to gain altitude. But for some reason, maybe it was on the ground and took off too aggressively, it lost its balance and fell.
Hi Alvin
Thanks for looking at the log.
The quad didn’t leave the ground and I applied throttle only until i was obvious the quad would pitch backwards and the props would hit the ground. I did this twice.
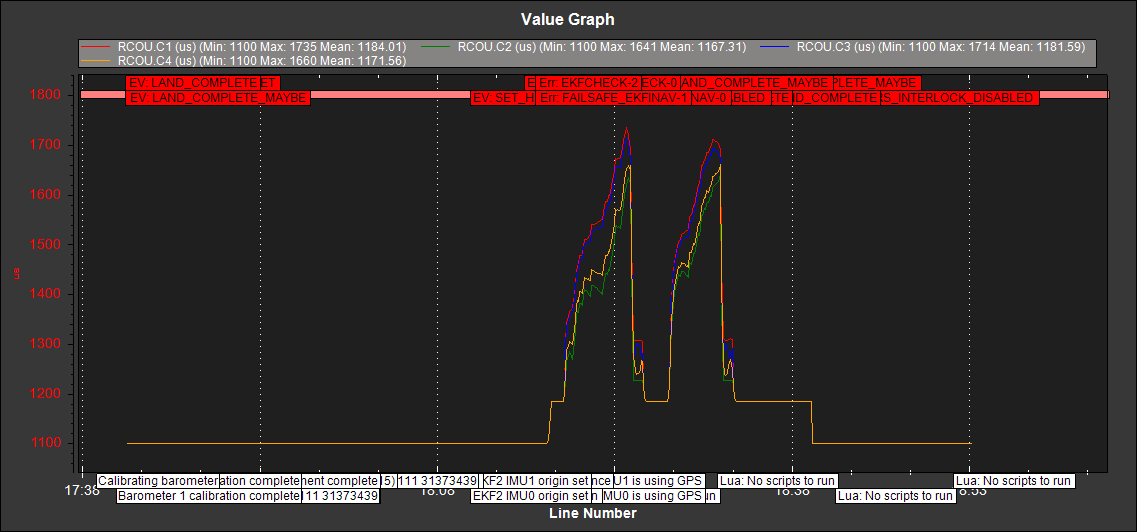
I notice that in your first graph that RCOUT C1 and RCOUT C3 , which I assume are the front motors, are greater than 2 & 4. If this is the case would the result would be pitch back? Have I got this correct??
As the copter just wanted to get height, all RCOUT should be the same.
If they are not, it is possible that the CG is not centered well. Shifted weight may causes motors at different position requires different efforts to maintain the balance.
I think you are correct about the CG. With the battery mounted on the top it is top heavy and unstable with the standard parameters?? I’ll try it with the battery below the frame.
Is there a ‘rule of tumb’ to work out the optimum vertical balance point that is best for the Cube?
It probably shouldnt make any difference. There are plenty of multirotors with batteries on top.
So long as the aircraft is reasonably well balanced forward/back/left/right.
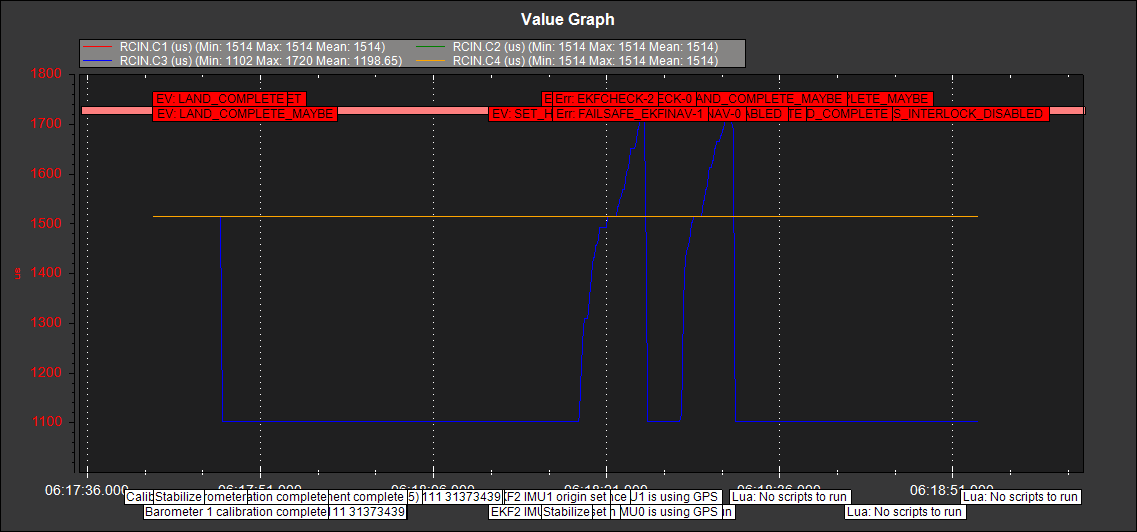
RC inputs seem to be OK…
You definitely have the ESC and motors physically wired this way?
And MissionPlanner motor test definitely activates the motors in the A,B,C,D order shown here?
Connect to MissionPlanner, in the HUD does the artificial horizon and compass follow actual aircraft movements when you move it around by hand?
With the aircraft sitting flat and level, is the HUD also flat and level?
In the RC Calibration screen, do all the green bars move in the same direction as the stick inputs with the exception of Pitch
ie: Roll stick left - roll green bar moves left. Pitch stick pull back (down) - pitch green bar goes UP
Hi Shawn
Thanks and I am 100% certain the motors are installed as in the first diagram. I will check the motors and RC calibration in Mission Planner later.