I’m trying to make my own spraying drone. but at half load (8.5 kg) I lose control of the drone. i can’t solve the problem. Could you please review the log files? thank you…
Can you tell no of motors you have and the configuration. Next, a picture of the drone would explain a lot. Finally a screenshot of the PID settings (in config and extended tuning tab) can also be instructive. Best regards, Winfried We recently tested a hexa copter with 15 liter payload, It has X8 Hobby wing motors with 30 inch props. We use Cube orange. Also use 2 batteries (on each side of the drone) Batteries are 12S 16Ah 20C. Hope you can compare some of these data… .
Always test in Stabilise and AltHold first - only after there’s reasonable stability should you start using Loiter.
Vibrations are unacceptable, you’ll need to fix that first. It could be frame resonance and flexibility, out of balance props, Flight Controller mounting. Secure anything loose, including wiring that might flap around. Ensure wires are not rubbing against the FC or pulled too tight. It could even be prop wash if the props are too close or over-flying the central part of the frame.
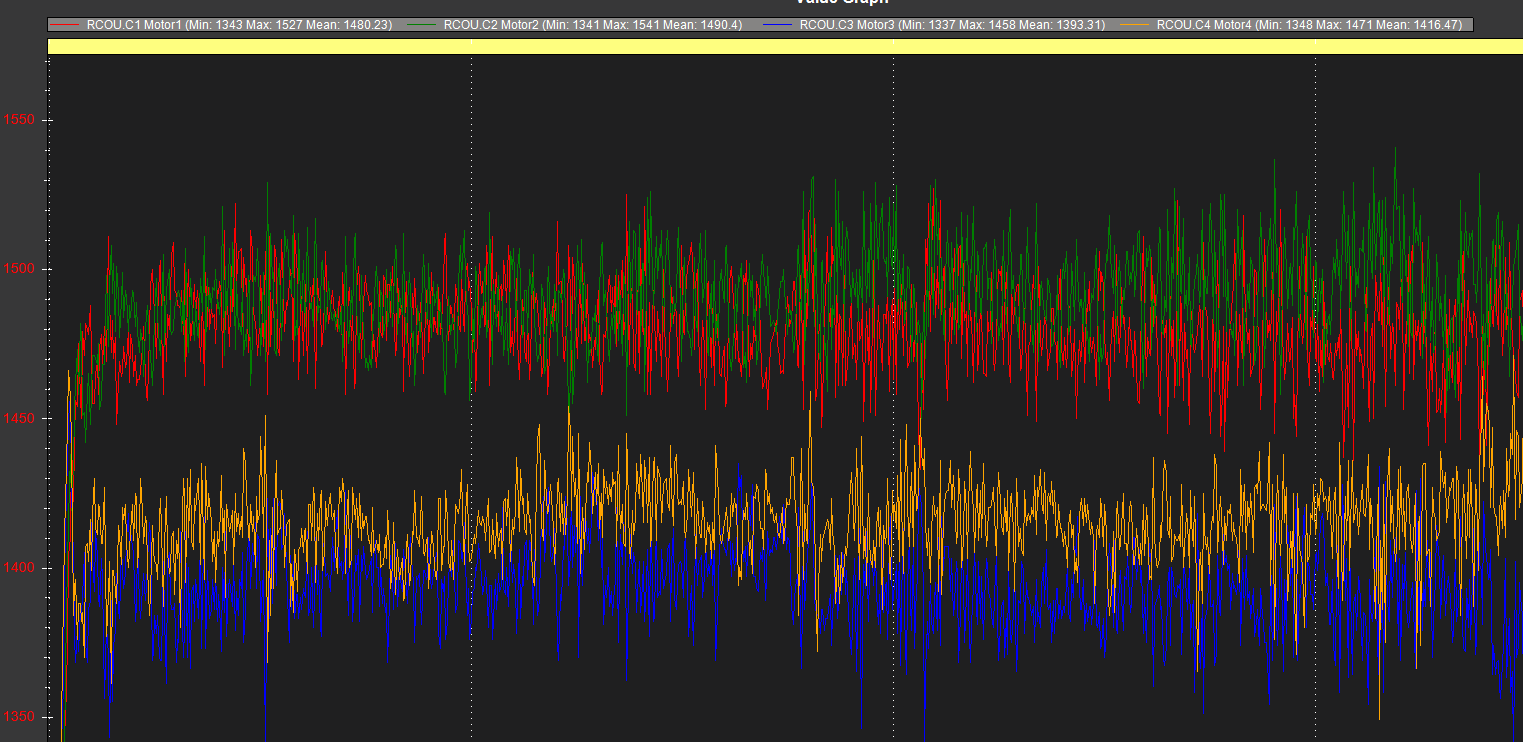
There’s a physical yaw imbalance, CCW motors have to work harder to counter-act the CW motors. This will be a slightly twisted motor mount or frame. All the props have to spin on exactly the same plane.
Parameters are mostly at defaults. Connect to MissionPlanner and go to Initial Parameters , put in your prop size and battery cells and chemistry. Accept everything it offers including the “suggested settings”
Setting the fence will force you to wait for a good 3D fix and Home can be set, but you dont want these things getting away on you. It gives you time to stand around and think too
Correct battery failsafe settings are essential even for testing!
Try these params in addition to the new params you just modified above
ATC_INPUT_TC,0.22
ATC_ANG_RLL_P,6
ATC_ANG_PIT_P,6
ATC_RAT_RLL_P,0.100
ATC_RAT_RLL_I,0.100
ATC_RAT_RLL_D,0.005
ATC_RAT_PIT_P,0.100
ATC_RAT_PIT_I,0.100
ATC_RAT_PIT_D,0.005
INS_LOG_BAT_MASK,7 (gathering data for the harmonic notch filter)
Try a cautious take off in AltHold and if it’s stable enough just hover for a minute at most then land and check motor temperatures.
Upload that log and lets check it.
If everything is going well you will probably have to do manual (transmitter) tuning on these big copters. You print out the tuning guide and cross off each step as you go. https://ardupilot.org/copter/docs/tuning-process-instructions.html
The Initial Parameters takes care of step 1 , you should start at step 2