Hi everyone
I want to ask about the stability of the drone hexacopter using FC Cube Orange+ with firmware 4.5.1
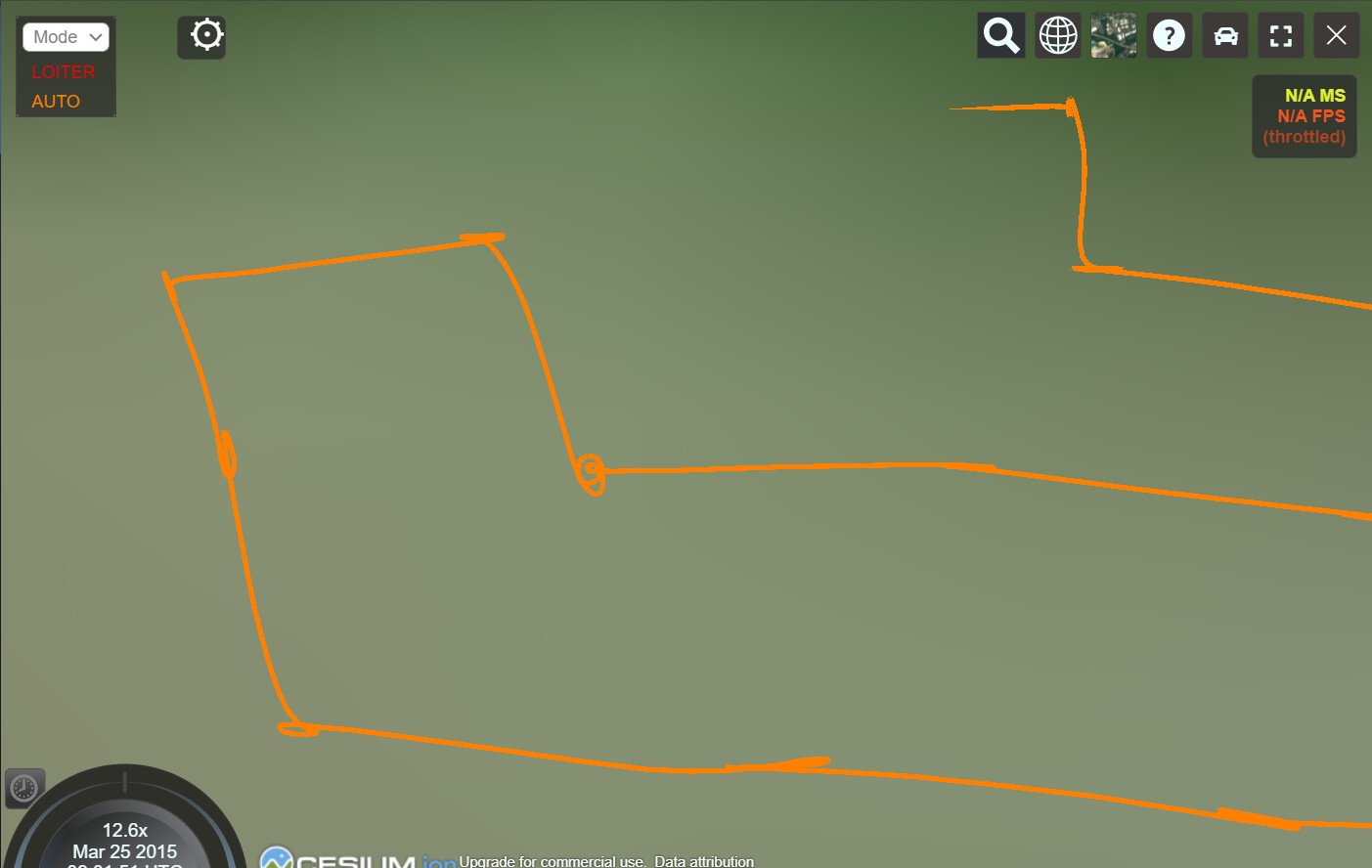
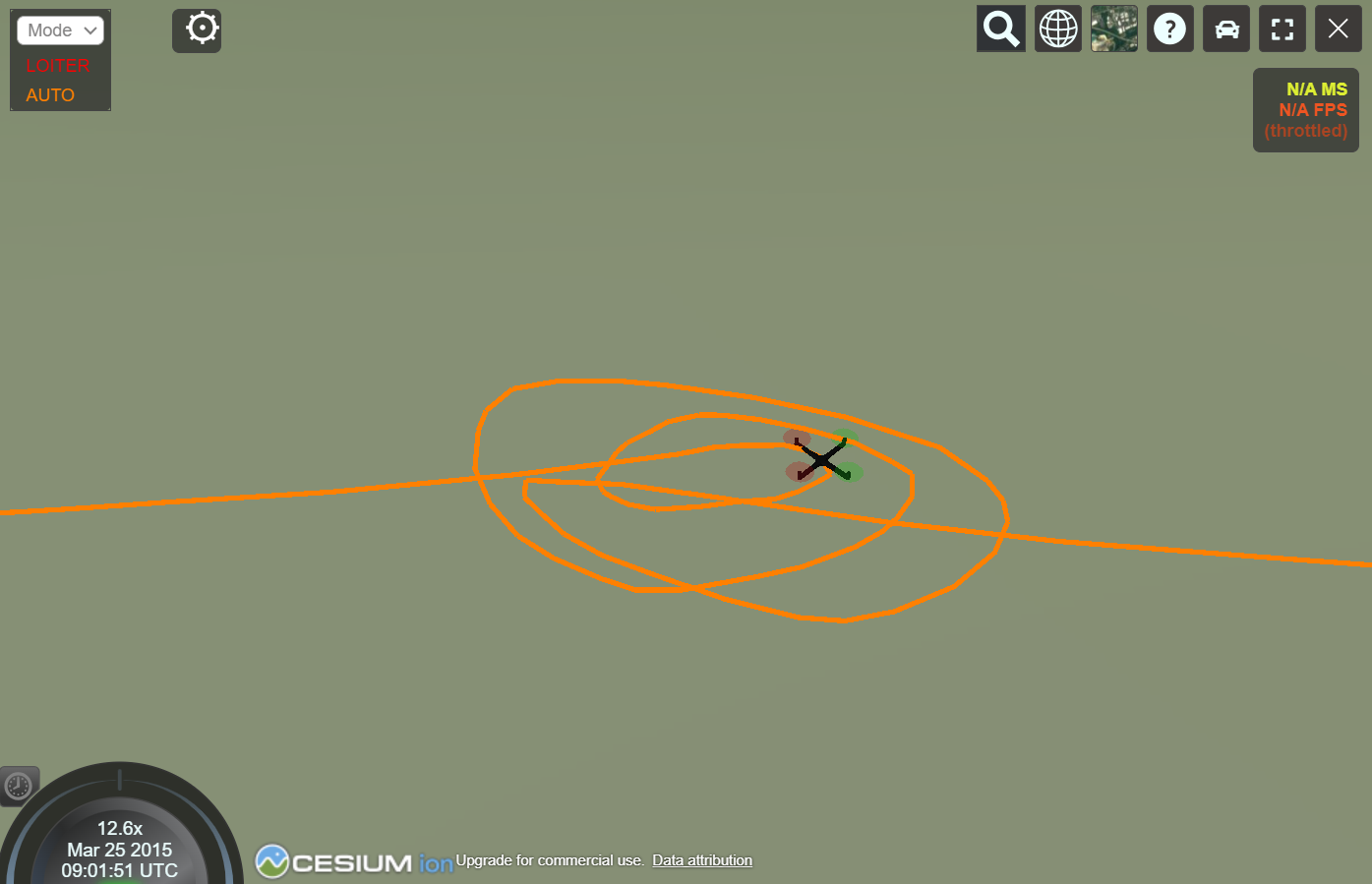
I experienced an issue when the drone was on an AUTO mission and arrived at the destination WP, the drone did not immediately stop but the drone’s movement experienced swings, which caused the drone to not be accurate at the WP.
Can you help me to minimize this problem, is it based on the parameters of the drone or device I use?
The movement of the drone during the mission can be seen in the following image