I’m aware that there is built-in vibration isolation for the IMUs on the Cube, but I suspect this isolation is optimized for the frequencies and amplitudes encountered on a drone. As some may recall from a year or two back, I’ve been experimenting with using the Cube as a flight data logger (not controller) for a manned ultralight airplane with a 25 hp two-stroke engine. I’d like to minimize errors due to the lower-frequency, higher-amplitude vibrations on this airframe.
I’m not a mechanical engineer, but my understanding is that if mount the Cube in such a way that the resonant vibrational frequency of the mounted system is much lower than that of the external vibrations, then the latter will largely get reflected away. What I don’t know is whether there are specific frequencies that would be mostly like to cause problems (e.g., the resonant frequency of the internal vibration isolation for the IMU). Any thoughts/ insights/suggestions will be appreciated.
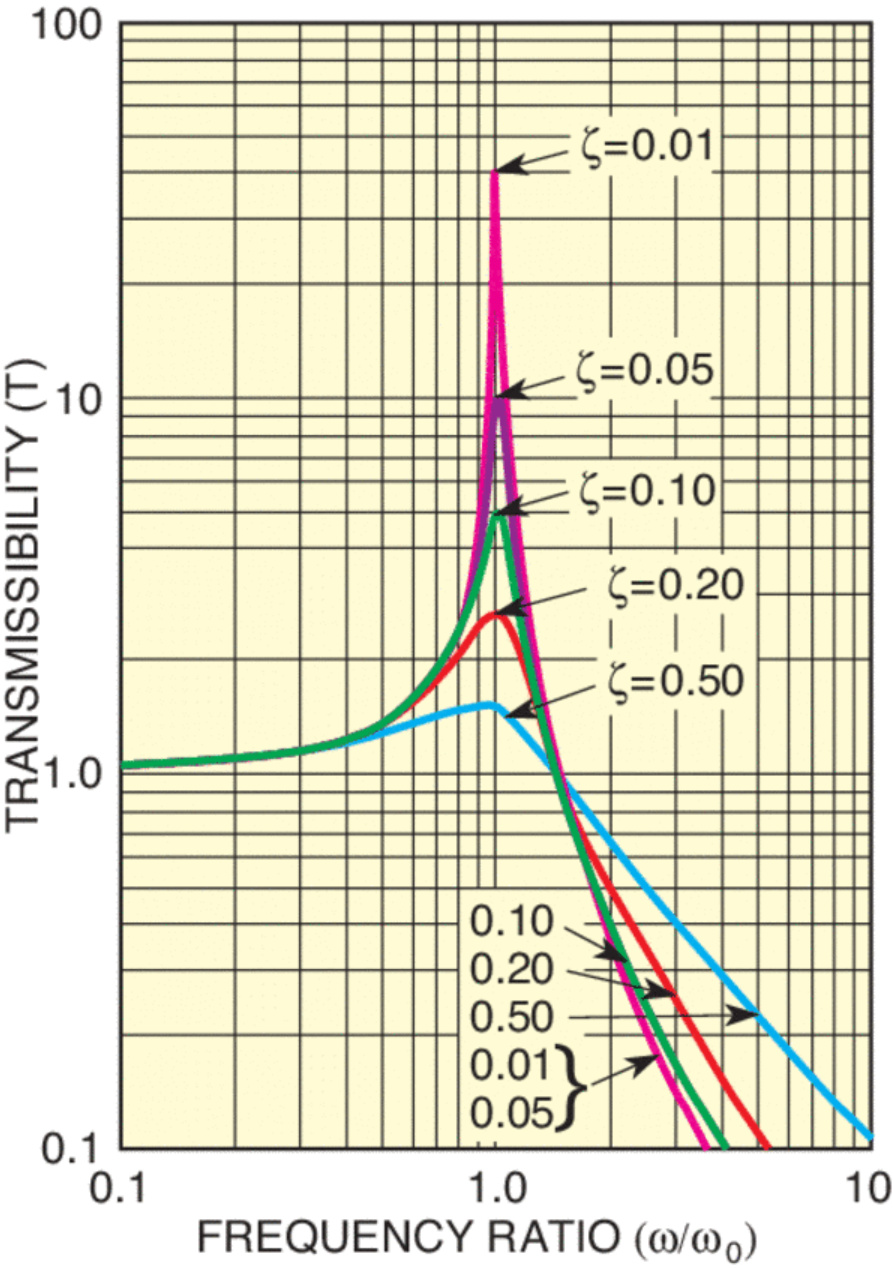
The resonant frequency of the Cube’s isolator is approximately 80 Hz, if I recall, which is 4800 RPM (assuming 1 beat per rotation, your engine may be 2 or 4 beats per rotation or something). In general, a system’s vibration response looks something like this:
Where the frequency ratio is (vibration freq) / (system’s natural freq). Like you said, you want a natural frequency less than your vibration frequency - a ratio of 2 or better is a decent rule of thumb - because an isolator can’t attenuate frequencies lower than its natural frequency.
The reason why the Cube’s isolator is 80Hz and not something much lower is because we don’t want to attenuate the actual movements of the drone. Small drone motors can respond in the range of tens of Hertz, so we can’t just ignore everything. Obviously, your (relatively) big aircraft definitely won’t be responding to control inputs that quickly, so you can probably afford to move the natural frequency lower.
He says the natural frequency is 60 Hz, maybe I mis-remembered. In any case, if your engine is constant RPM, then ArduPilot’s notch filter can help you there. Latest versions of ArduCopter (not sure about Plane) allow you to log full-rate IMU readings pre- and post-filter.
Unfortunately, engine RPM typically ranges from 1200 (near idle) to over 6000 RPM, depending on power, so notch filter won’t help. Looks like I need to add my own isolation with a resonant frequency of 10 Hz or less. Thanks for the insight!
And don’t forget you can add mass to the Cube’s side of the isolator. That’s a good way to lower the natural frequency, and it would be trivial for you to add a few hundred grams to your ultralight.