I Mount Pixhawk Cube black on the drone and seeing data on the mission planner. We observed altitude reading not correct it shown wrong data and also store wrong data on SD card. some time it stores the correct reading on the Pixhawk SD card but on mission planner, it shows the wrong reading but mostly it showed the wrong altitude on mission planner.
I also try by connecting Pixhawk with USB and notice altitude on the mission planner but it shows again wrong altitude and altitude value also variable.
What sensor(s) do you use to determine the altitude?
Do you use GPS, baro, lidar, or anything else?
I have used a barometer sensor. But its altitude data not right or it changes continually if I place my pixhawk on the ground.
So please tell me how can I calibrate or configure pixhawk barometer.
Do you have the same problem even when the Cube has fully heated up?
Can you post a picture to show how is your Cube being placed in the frame?
Yes Sir, I have facing the same problem.
Can you post the log which shows incorrect altitude?
I think you may need to distinguish different types of altitude in ardupilot system, and point out which one of it is incorrect in your copter.
https://ardupilot.org/copter/docs/common-understanding-altitude.html
As mentioned in ardupilot wiki, the altitude is acquired from multiple sensors fusing together. Using only barometer may not give you high accuracy.
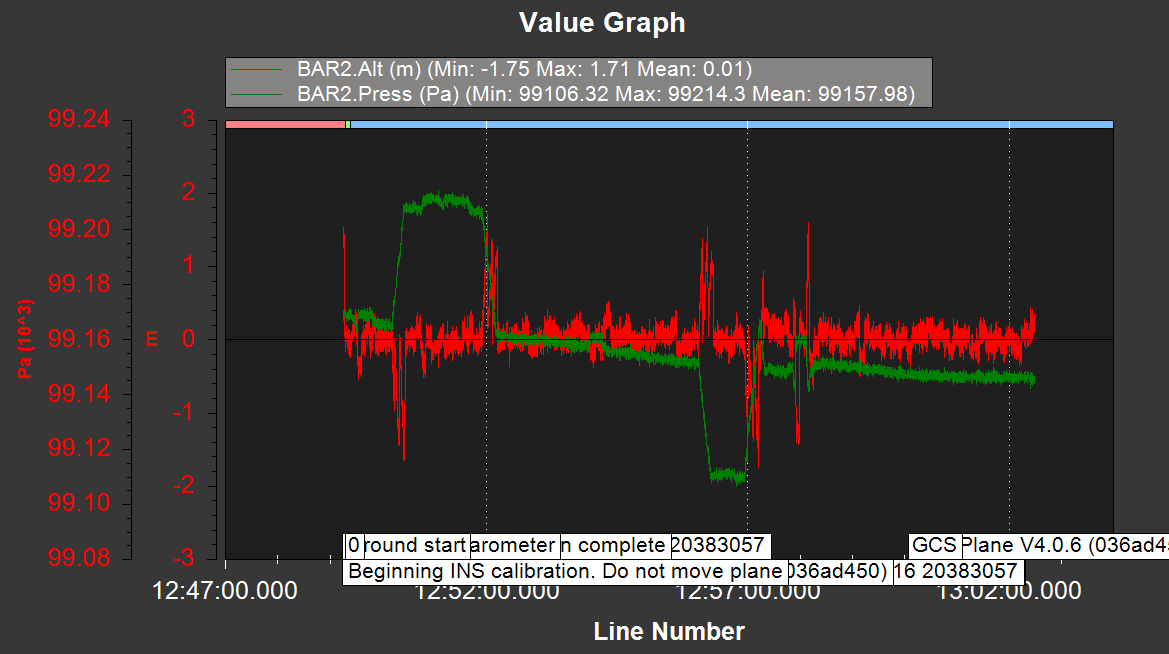
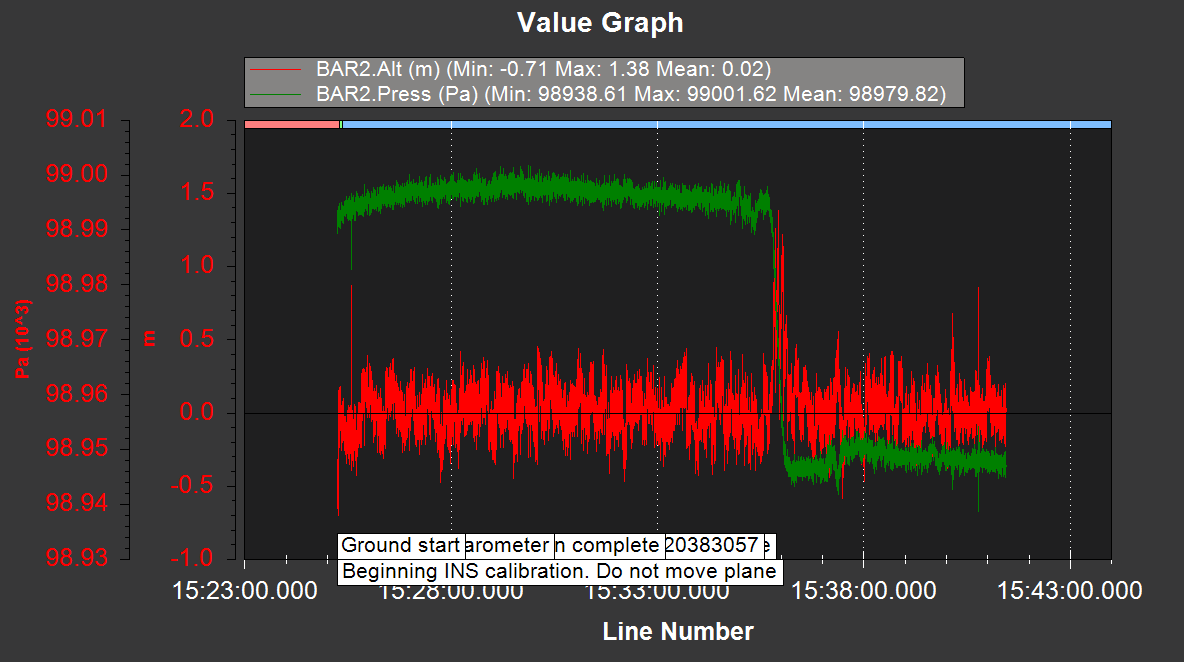
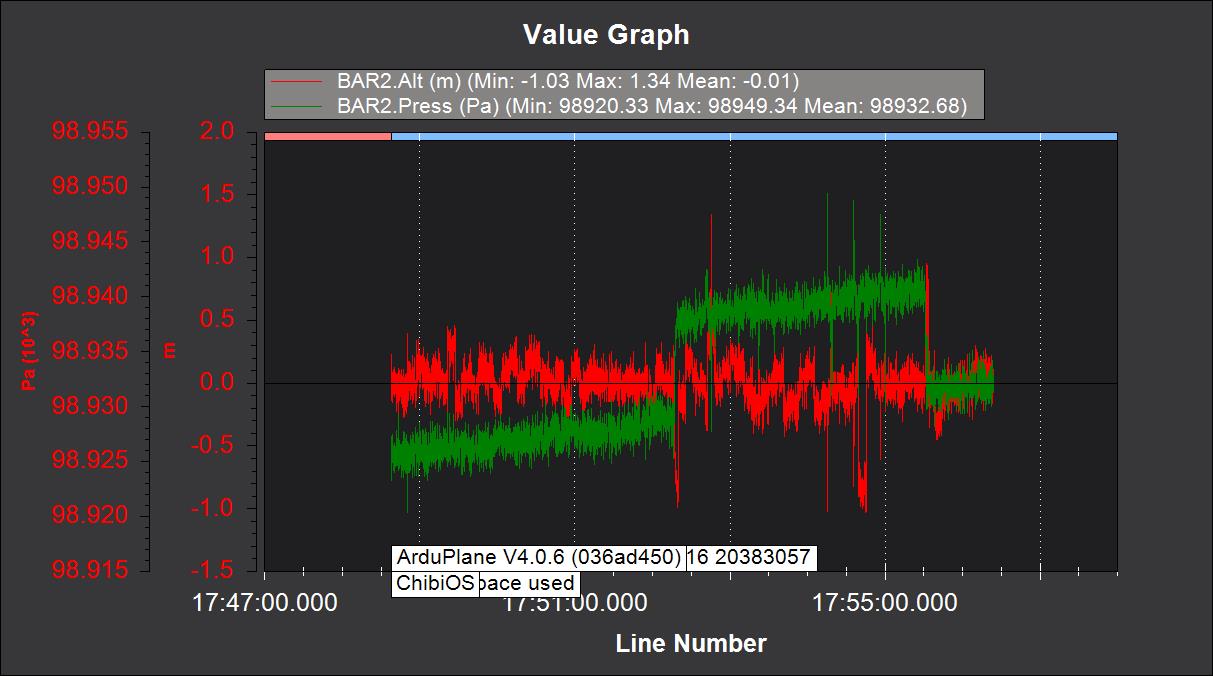
Hello Sir I have upload log data on the image. Red for altitude and green for pressure. In all image pressure change, according to hight but altitude have very low change. The maximum height I have tested is 8 meters but not store in the mission planner. i observed pressure change according to height but altitude value has no change.
You may try to calibrate your baro
https://ardupilot.org/copter/docs/common-baro-temp-comp.html
But as explained here:
You shouldn’t be needed to calibrate the baro.
Are the log taken on ground or a flight? Do you have a cover on the Cube on the copter?
Sir, I have log data in both cases (ground and flight). but in each case, the altitude was not right.
Can you try to reset all parameters, cross-loading the firmware (eg: copter -> plane -> copter). Then recalibrate everything and post a 15-30 mins disarm log here?
When logging the cube should be stationed on ground.