this is mi setup
pix 2.1
here 2
esc holybro tekko 32 blehly
tmotor 3508 380kv 14x4,8
frame y6b
i will start mi discuss with a serius problem that i have with this setup, before update all hw i have a old version of that frame with about 100 flight with no problem. i had pixhawk original 16bit blhely setup 3.5.7 firmaware. i have setup the new one with same setup of timing and pwm frequency 16degree ad 24khz.
hw upper here and 4.0.3 versione
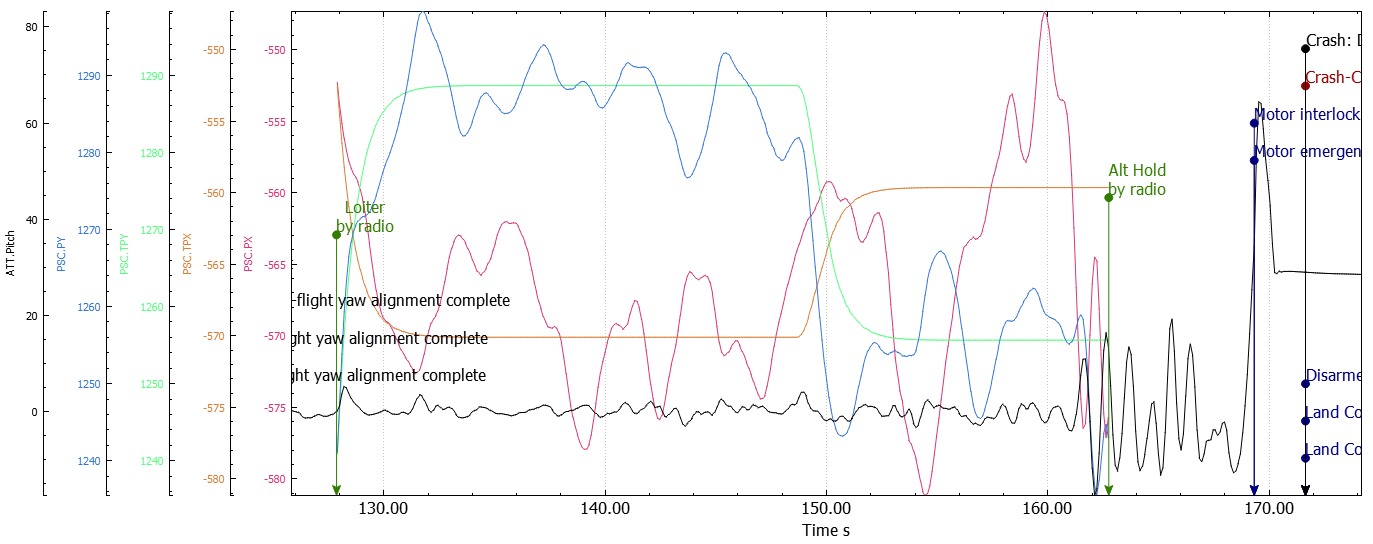
first flight was done with no issue only some sluggish control. the second flight the drone start to oscillate in pitch axis and the crash .
can anyone help me ?
below both parameter and log of new one
https://drive.google.com/drive/folders/1xKkESajcUMBNL9pvrZJ3lRZxlSiMEUbG?usp=sharing