Hello guys
I’'v done building my hexacoper 12s 22" with cube and rfd 900+ and futaba radio
after first three or four good flight the last flight it was windy a little bit at the beginning it fly very well but suddenly i loss RC control and telemetry data … so it kept going forward without any respond and then i was lucky because it crashed to a mountain 400 m away
by the way there was a mavic pro flying beside it and at the same time is lost signal for a while is there a chance that the mavic signal interface with my rc signal??
i’m so annoyed because of that i was so happy about it until this happen and now i have to buy a new set of propeller and takes forever to arrive to me
logs & pic
thanks in advance
I see vibrations and clipping, but that might be because of the terrain
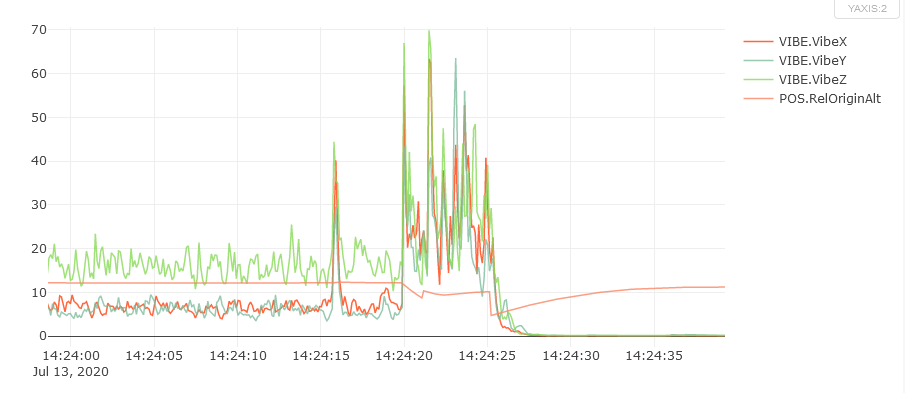
About half way through the log it’s like your RC stops responding
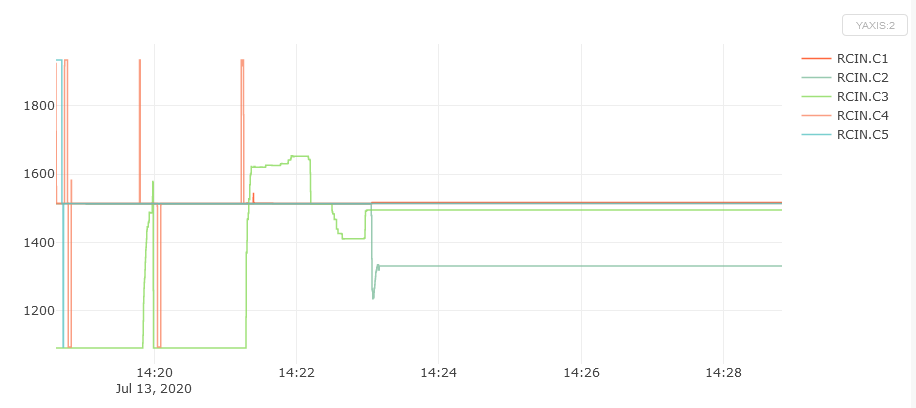
I dont think your throttle failsafe is working probably because I’d say the transmitter/receiver failsafe is not set up correctly. Usually you need to bind while RC channels are how you want them to appear to the flight controller when things go bad. Bind with throttle set to less than 975 pwm if you can. Read the doco for your particular Tx/Rx.
A DJI in the area shouldnt affect yours, but stranger things have happened…
Do a range check too - the safe way is to leave the craft in one place and drive/walk/ride away with the transmitter and see if the craft still responds to flight mode changes. You might need someone with a walkie-talkie or phones to help you. The built in range check on the Tx/Rx’s does help too, they use much lower power to simulate distance. You might be able to use that feature check around your craft from different angles to see if you’ve got a black-spot/shadow in the RC reception. Carbon fibre is opaque to radios signals.
You dont have any voltage or current monitoring set up either - that is essential. First set the power-brick type then reboot the flight controller, then you can set the rest of the parameters.
1 Like
thanks for looking in it…
Right it was my fault not to setting the throttle failsafe but it’s not the first flight and in earlier tests i went further distance and it’s signal was solid and never lost for four or five flight tests … so i’m wondering what is the reason behind the signal loss…