I couldnt get those videos to work properly, not sure if that’s my player or what…
Secure all the wiring so nothing vibrates around, but not so tight it pulls on the FC and transfers vibrations. It’s also easy to end up with an ugly flying ball of cable ties 
Probably check your prop balance too, there’s still some X and Y vibrations there, but not very bad.
Try flying in ALTHOLD mode instead of Stabilize - Stabilize is still your “go to” mode in emergencies so definitely practice more, but ALTHOLD is much easier for test and tune. After some more checks you’ll want to try LOITER.
And get a bit more height, about 3 meters or more to get out of ground effects.
Change
ATC_INPUT_TC,0.15 to 0.20 or 0.22
and see how the RC control is then, should be nice and smooth.
Set these:
BATT_ARM_VOLT,22.1
BATT_CRT_VOLT,21
BATT_LOW_VOLT,21.6
MOT_BAT_VOLT_MAX,25.2
MOT_BAT_VOLT_MIN,19.8
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
FENCE_ACTION,3
FENCE_ALT_MAX,50
FENCE_ENABLE,1
FENCE_RADIUS,100
FENCE_TYPE,3
Be aware those Fence settings will stop you arming UNTIL you’ve got a good 3D fix, and limit your range, so you may need to adjust those settings a bit. It’s good for testing though, you can loosen those restrictions once you’re more confident in the craft.
There were some GPS glitches and number of sats went down, HDOP went up - could be because of proximity to the ground and trees. See if you can get out in a clearer area. GPS always works better once you’re up in the air. If you’ve ever got to recalibrate compasses, get out in the open, wait for a great GPS fix and then do compass cal.
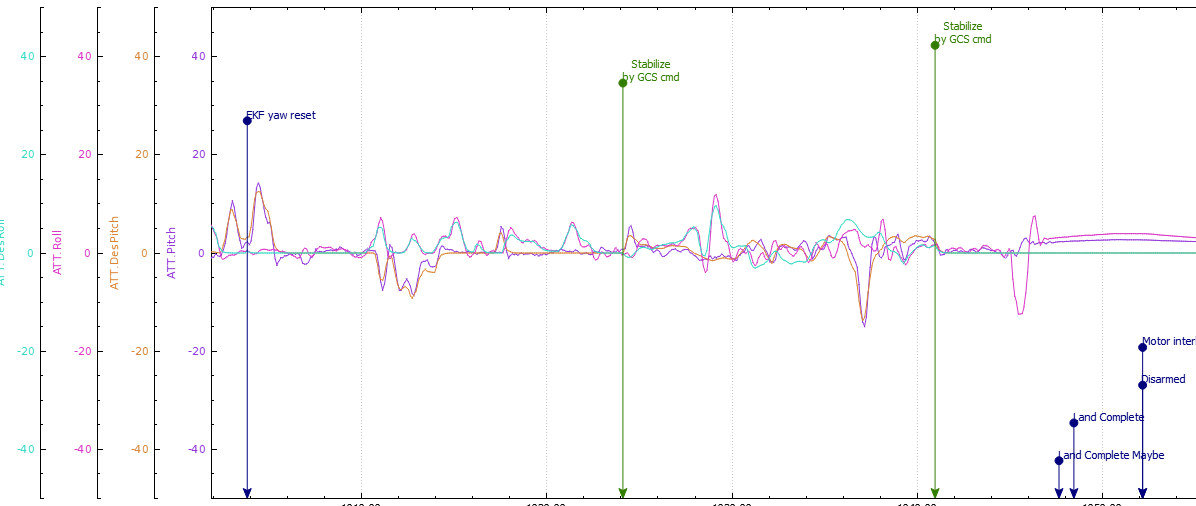
Pitch and Roll are doing OK, could be a little better but usable.
I’d probably change the PIDs a bit - be aware I could be wrong or it might not be everyone’s preference.
From these:
ATC_RAT_PIT_P,0.135
ATC_RAT_PIT_I,0.135
ATC_RAT_PIT_D,0.0036
ATC_RAT_RLL_P,0.135
ATC_RAT_RLL_I,0.135
ATC_RAT_RLL_D,0.0036
To these:
ATC_RAT_PIT_P,0.12
ATC_RAT_PIT_I,0.12
ATC_RAT_PIT_D,0.005
ATC_RAT_RLL_P,0.12
ATC_RAT_RLL_I,0.12
ATC_RAT_RLL_D,0.005
…and see if it flies better or worse. Do a small test flight and then land and check for hot motors or anything else strange.
Once all this is done, tested and the craft is flying well, get out into that really open area with no wind and do Autotune. I set it for Yaw axis first, then Pitch and Roll, seems to be safest.
- Arm and fly around in Loiter, if that’s OK switch to Autotune mode and let it do it’s thing (reposition if needed).
- Once complete and there’s no more Autotune twitching, leave it in Autotune mode, bring it back and land and disarm.
- Wait a few seconds to save new settings, switch to Althold or Loiter, arm and test fly.
If everything has been going well you can Autotune all axis together, it takes less and less time if the tune is already pretty close.
Then there’s always the Harmonic Notch Filter…