Hi Everyone, Recently we had observed erroneous data from GPS and this led to a crash. Just wanted to know whether there’s any trend that could be noticed in the data to classify/identify that the error is due to spoofing or jamming. Also, if there are any methods that could reduce/avoid this error. Thank you.
Hello, share logs.
I agree with @RedbullF1 that a .bin log is necessary since it would be unusual for for GPS errors or loss of GPS to cause a crash, unless a change in position caused a collision with an object.
If ardupilot loses it position, a plane should circle and a copter should land.
Hi Guys, I have attached the crash log here.
I cant say I trust that firmware - some modified version of Arducopter 4.1.1 which is very old for a Cube Orange+. I believe you should be on the latest stable firmware. If there’s some special reason you have modified firmware, then get it re-based on latest stable and re-compiled.
You should be able to use all 3 IMUs too.
As suspected, I dont believe the GPS performance is the source of the bad landing and tip-over or crash.
The copter is still moving laterally even though it’s in Land mode, which wouldnt normally be possible unless there were extreme winds.
EDIT:
In fact RTL had been denied a couple of times and the copter switched to Land mode, and Land mode could drift with wind. The pilot should be aware of these mode changes and ready to take control.
There were also GCS failsafes, so that’s something else to look into.
If strong winds were the issue then the pilot should have taken control in Stabilise or AltHold mode and tried to land the copter in some safe manner. There were no RC inputs or attempts to take control.
There’s warnings in the log that indicate:
SRC=1/10:Caution; speed exceeding 10 metre per second limit
and
SRC=1/10:Engage RTL; vibration-z more than 20
So you will have to check and fix the Z axis vibrations and investigate what was causing the drift during Land mode.
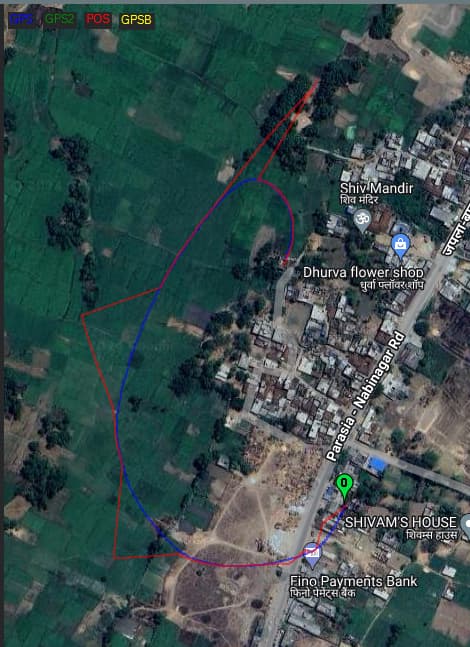
The GPS seemed to be reporting valid position information - I suspect that if GPS interference or spoofing was the issue, the position would appear steady but the copter would be moving. In this case the GPS position and copter movements appear to match.
Try GPS_GNSS_MODE,5 or 65 to see if you get a more reliable low HDOP, selecting a whole lot of constellations is counter-productive.
Adjust these settings, which are unrelated to the crash but should help flight a little bit, and aid better troubleshooting:
INS_ACCEL_FILTER,15
INS_HNTCH_BW,25
INS_HNTCH_FREQ,50
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_HMNCS,3
INS_HNTCH_REF,0.13
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
LOG_BITMASK,180222
Enable all IMUs if possible
INS_ENABLE_MASK,7
INS_USE3,1
EDIT:
Your Land mode options allow repositioning, so the pilot could have just used RC inputs without even changing modes.
If there was actually some sort of jamming or spoofing occuring then there is likely nothing you can do about it, and you shouldnt fly unless you can confirm no interference and a good GPS 3D Fix.
GPSJAM says your area is good, no jamming.
Areas without a specific colour just mean there’s no data recorded there (no planes flying with GPS navigation and reporting)
1 Like
Hi @xfacta, Thanks for the insights from the data. As you pointed out about the repositioning in LAND mode, the system had crashed before the pilot could take control and this was known. But the main reason that we are suspecting GPS is due to the divergence in EKF position innovation data.
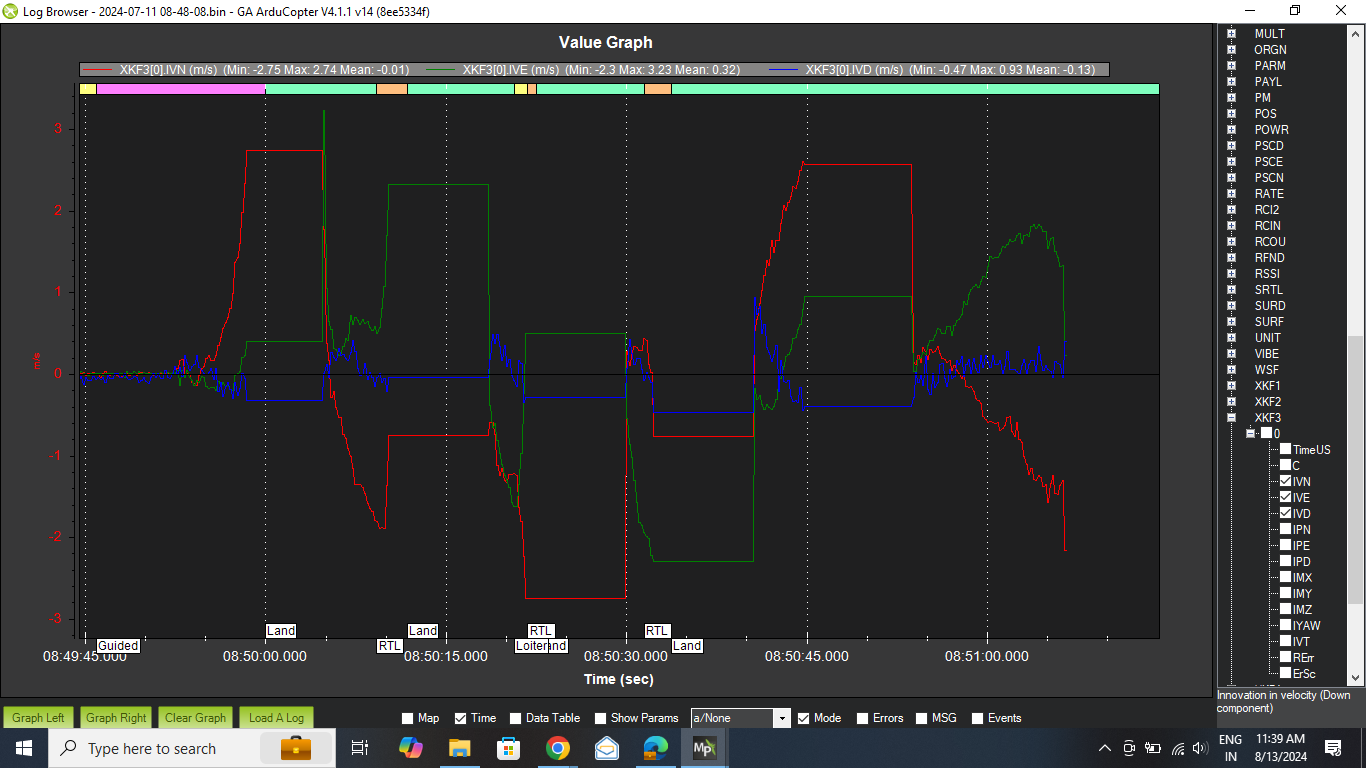
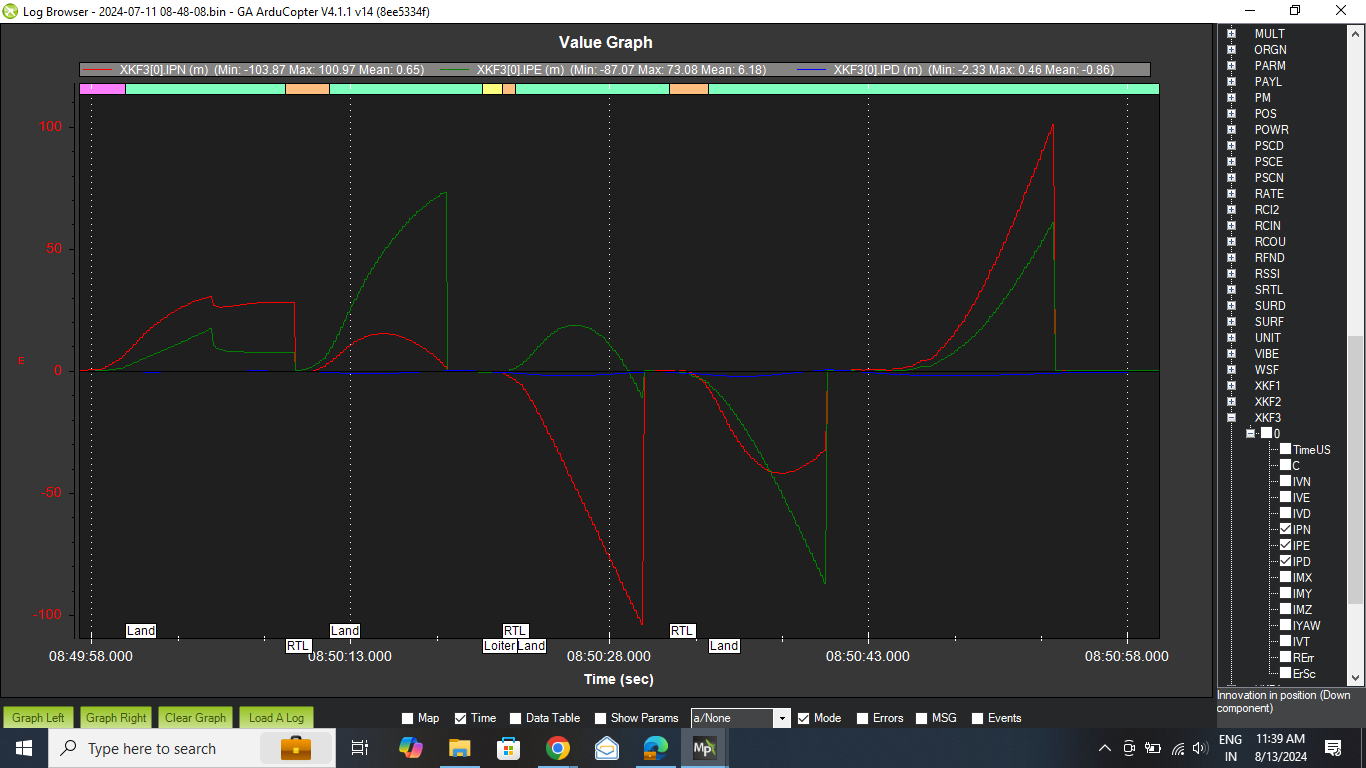
As we know, the main source of Position to EKF is GPS these deviations could point errors in the received position data.
I agree there certainly is anomalies, but I cant conclude it relates to GPS jamming at all.
More likely there issues with vibrations causing the IMU position differences, and possibly even firmware bugs getting involved.
Note the GPS path is smooth and believable, it looks like the IMU-calculated path deviates.
So I would investigate and cure vibrations, update the firmware version, enable all IMUs, and deselect all those GNSS constellations that are not helping you.
For example where I am the Beidou network has lots of satellites visible but a poor HDOP and just causes me trouble.
1 Like