I am in need of some help. I have a Herelink controller with a Black Cube with Here 2 and now running Copter 4.0. I am using in on a fairly big hexa copter setup with 30 inch props.
I downloaded the software…no problem. Ran thru the setup without too much difficulty and tested the motors for direction with all looking good. Did the accel and compass calibration and decided to give it a try at a wide open field.
I was in AltHold to do my first flight and slowly raised the throttle. Motors started to come up and pushed a little more to get it off the ground and this is when it just took off to about 100 feet instantly with a bad wobble and constant yaw rotation. I was commanding it to come down, but it was so slow to respond and drifting, wobbling and rotating out of control. I managed to get it down 20 secs or so later. I am scared to death to try anything else.
I did notice (I should of looked at this before I flew) the yaw heading is about 70 degrees off from my phone compass. Would that cause all this? Why did it shoot up to 100 feet in 2-3 seconds? I do not know where to go from here. I loaded to the logs up and looked at them, but I have no idea what to look for. Attached is the log of the flight. PLEASE can someone help? Much appreciated. I want to learn.
You don’t learn arducopter on a 30-inch prop hexacopter. Period.
Learning is done on a simple multicopter, with cheap and readily-available spare parts, where every mistake can be corrected for fast. A DJI Phantom-sized copter, maybe bigger, but not by much.
Once you’re familiar and comfortable in the environment, with tens or maybe hundreds of flights, events, reactions and log analysis, you can “graduate” to the big hexa.
Bad compass (most likely too close to high current parts which affects magnetic field)
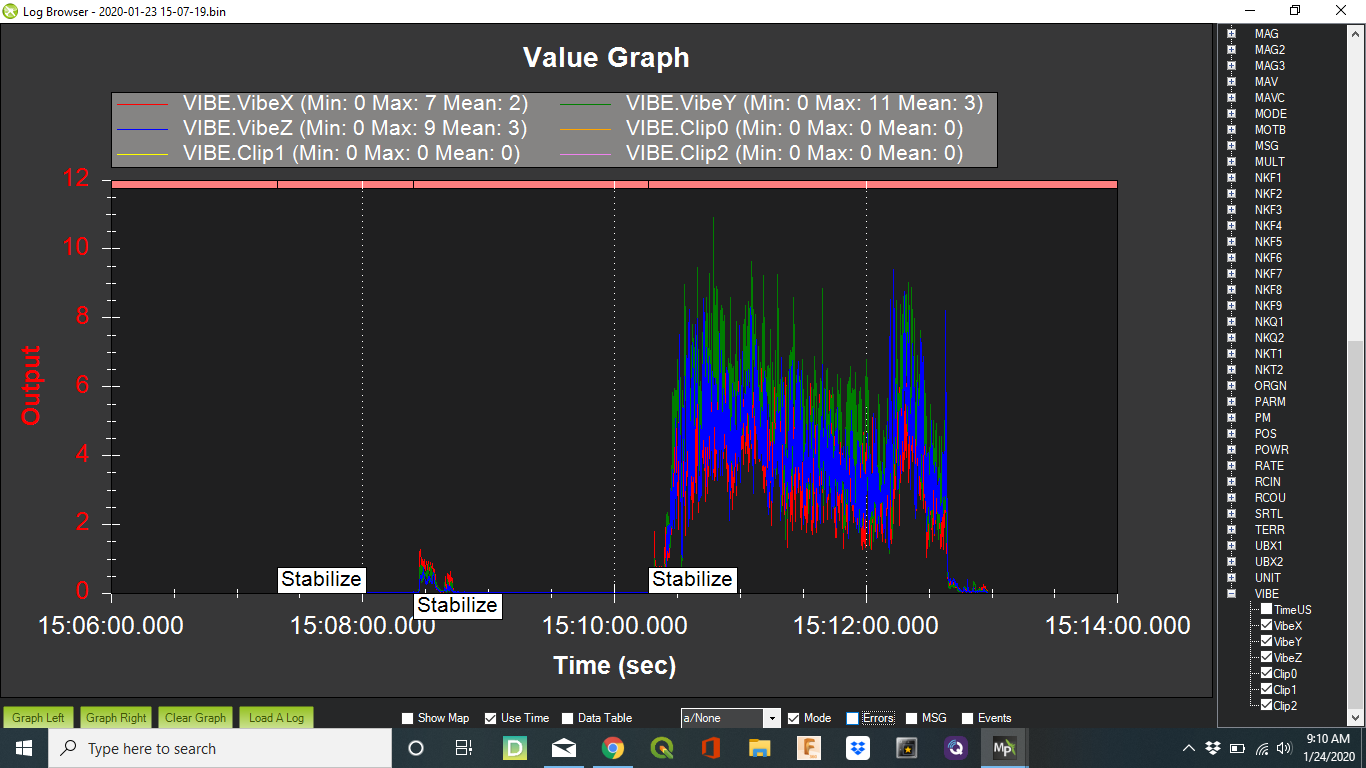
-Very bad vibrations, causing bad accelerometer readings which messes with altitude estimation (major reason for sudden ascent)
-Overpowered copter, Throttle out is below 0.2 which should be 0.4 in normal conditions.
Also you seemingly did your maiden in Alt Hold. A copter should be maidened in Stabilize ideally where you can fly it and get initial logs. Vibrations can really mess up Alt Hold. Stabilize is much less affected by vibes.
Honestly the advice to learn the ecosystem on a cheap quad is sound.
I will go to a smaller copter and try again. I have been using on the same big copter’s the DJI A3 and have had no issues. I am using anti-vibration tape and the compass is way out on the arm and on a aluminum stand. There is no metal or wires around it.
I am trying the Cube and Herelink because it has has a lot of versatility and the A3 does not. It has been a frustrating start as I am not new to building UAS’s, but I will keep going as I have over $1000 into the Cube and Herelink.
Big success today! Had a nice flight in Stabilize mode…will continue working at it. Tried to takeoff in Loiter mode but, it did not feel good and aborted. Should I continue tuning it in Stablize mode? I lowered the gains, but it feels real mushy. Just a quick question…iff I went back to PX4 firmware what would be the first flight mode I should start with? I think the modes are slightly different in the two different firmwares. Thank you all!!
I think AC is significantly more capable than PX4.
When you have your vibes under control and mag well calibrated you could try an autotune as long as it is flying well. Go through the wiki and post at Ardupilot Discourse if you have questions.
My friend, I higly recomend to start with a plastic 450 frame quadcopter, using plastic props and the same Cube, GPS and HEreLink. There are a LOT of varibles you have to learn and know to fly that Hexa safe (im on this several years and every day I lear something new), and not because you can crush it and lose all your money, its becasue if that drone hit a person on the head or one of that props hit someone eyes, you are going to make so much damadge, and may be we hope not take a life.
So pls, if this are your first times with multicopters, dont try that big one, start small.
I am not so much about “please put it on cheap setup”. Because you did just swap from A3 right? Risks is your own business.
Have you removed the gimbal or such load when installing Cube? First attempt did look a bit like to much thrust ratio to me. I would not fly less then 40% throttle needed for hover according to motor sheet @ selected prop. If less, add a stone or something steady.