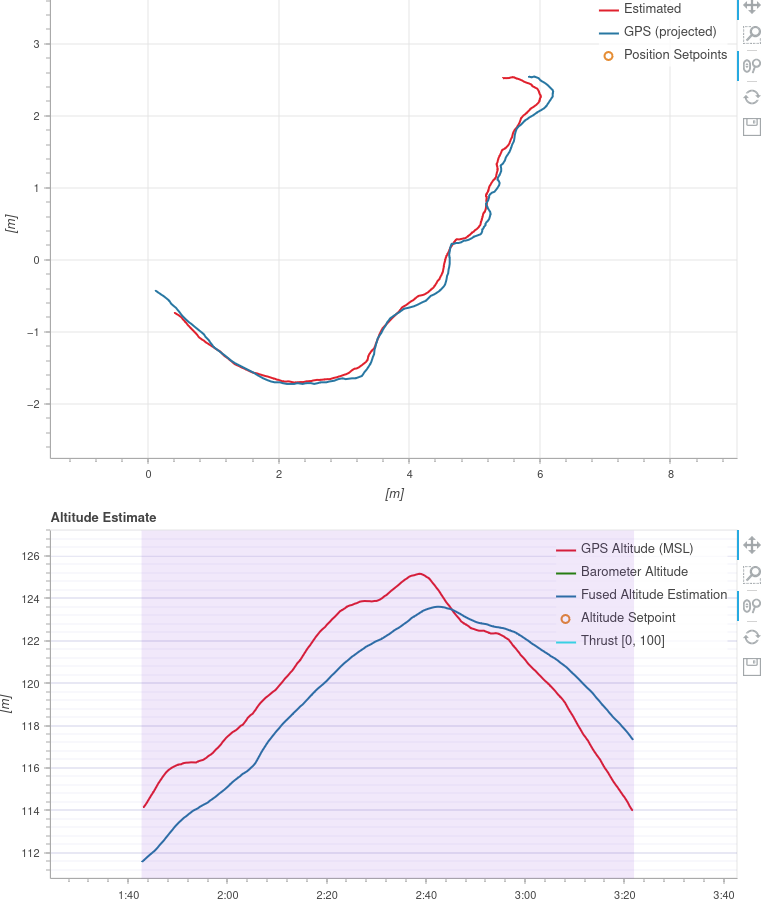
Hi everyone, I’m using a Here3 RTK GPS with a Cube Orange, running PX4. I’m noticing a significant amount of drift on my GPS measurements even though the HDOP and VDOP as reported by PX4 seem fine. So I ran a test with the aircraft on the ground, not moving for two minutes, and according to the logs, the horizontal GPS measurement drifted by up to 6m and the vertical by up to 11m at one point, as shown in the plots below. The log is available here: https://logs.px4.io/plot_app?log=ee315e90-1fc0-44e0-97c7-27b54c4da6d8
I’m not sure why this is happening. While there were a few buildings around where I tested, the GPS reported 15-16 satellites all the time, and this much inaccuracy seems surprising. The only possibility I can think of is due to the sensor having been involved in a recent crash. However the sensor itself did not suffer an impact during that crash and there are also no discernible signs of damage. What could be causing this?
11 meters vertically seems excessive. I recall using this same setup before and it got much better results, even without RTK. Plus the documentation claims 2.5m of accuracy on a 3D fix.
Also, I do believe that at some point I did a test with RTK and still got quite a bit of drift. I didn’t have logs from the attempt but I recall the height estimate drifting by more than several meters. I’ll try doing another test soon.
I would also say that this is not out of the ordinary depending on obstructions, weather, etc., without using RTK.
Also, do you have any (new) electronics close to the GPS antenna that could interfere? General suspects are cameras, USB3, Ethernet, that sort of thing.
I did rerun the test, with and without RTK and also on two spare GPS modules. With RTK, all of them were able to get under 0.5m. I didn’t have time to have the survey run for very long so the results seem to make sense. For without RTK, I got the same results for the original GPS, but around 2m horizontal and 3m vertical for the other two. The location we tested at could have been a lot more open so I suppose these results are normal, but I’m not sure why the original GPS in particular had worse results.
The thing that’s been bugging me is that at our original flight test using that GPS, we did have RTK (as indicated by the GPS fix type in the logs), but we were still seeing a lot of drift. Unfortunately I didn’t get to collect a log with the plane being still, but I recall we had multiple reports of “height estimate unstable” and saw quite a bit of altitude drift before we armed. And I have been unable to reproduce this exactly. Right now we’re just going to use another sensor for now and hope it doesn’t happen again. The log is here: https://logs.px4.io/plot_app?log=fae34c24-dcca-47e0-b033-4ca29ed3d1a4
Regarding electronics, the GPS was mounted outside the plane and nothing was very close to it. We do have a camera (Yi Action Camera) and an analog VTX setup, and a SiK telem radio. Nothing new though and that’s pretty much it.
Use GPS_1_GNSS to limit the number of constellations.
Usually choose two constellations
For example Beidou can add a lot of satellites but give a poorer HDOP or longer time to fix.
Only select SBAS if you actually have SBAS available in your area, such as USA.
This is a bitmask!
So GPS+SBAS+Galileo is bit0(1) + bit1(2) + bit2(4) = 7
Thanks for the suggestion! I will try to do some tests when I have access again. However, the Here3 docs only mention support for GPS, GLONASS, and BeiDou. So I assume no Galileo? But SBAS would be fine since it broadcasts on the same frequency?