The following message is displayed when automatic analysis is performed with Log.
Log File C:\Users\y-kato\AppData\Local\Temp\tmp18D1.tmp.log
Size (kb) 7187.982421875
No of lines 81964
Duration 0:03:49
Vehicletype ArduCopter
Firmware Version V4.0.3
Firmware Hash ffd08628
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
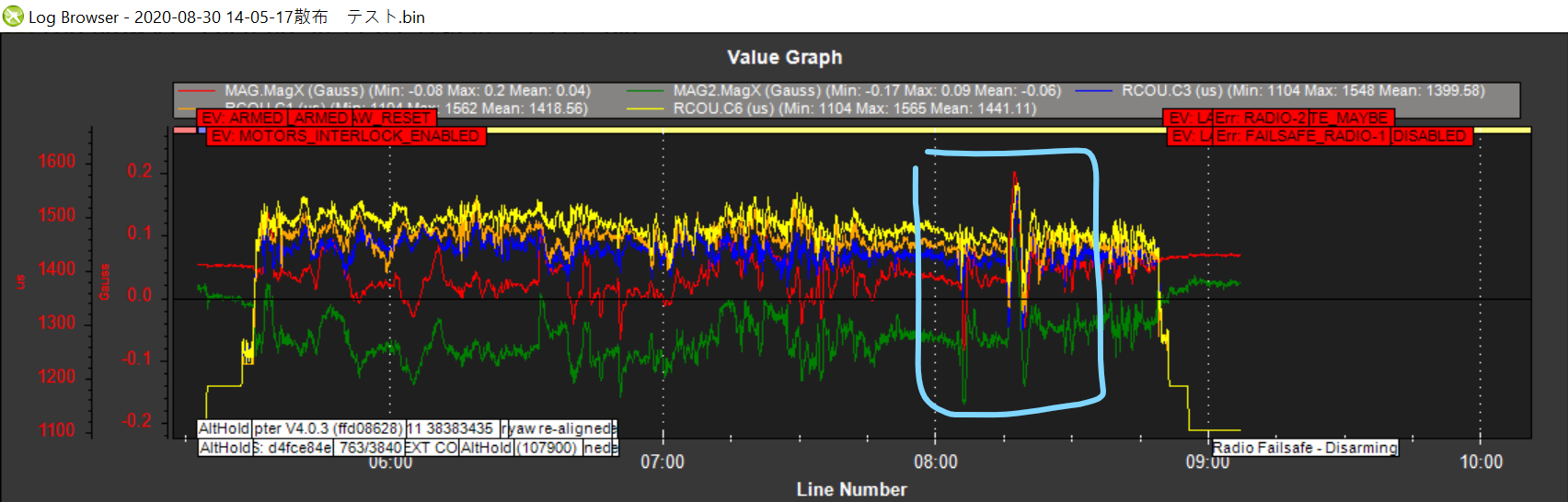
Test: Compass = FAIL - Large change in mag_field (64.78%)
Max mag field length (739.82) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERR found: FS_THR
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.30, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = WARN - Motor channel averages = [1418, 1379, 1399, 1399, 1351, 1440]
Average motor output = 1397
Difference between min and max motor averages = 89
Test: NaNs = FAIL - Found NaN in CTUN.TAlt
Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = FAIL - 18 slow loop lines found, max 8.20% on line 46662
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
I took various measures due to a compass error, but it did not become “GOOD”.
Will there be any countermeasures?
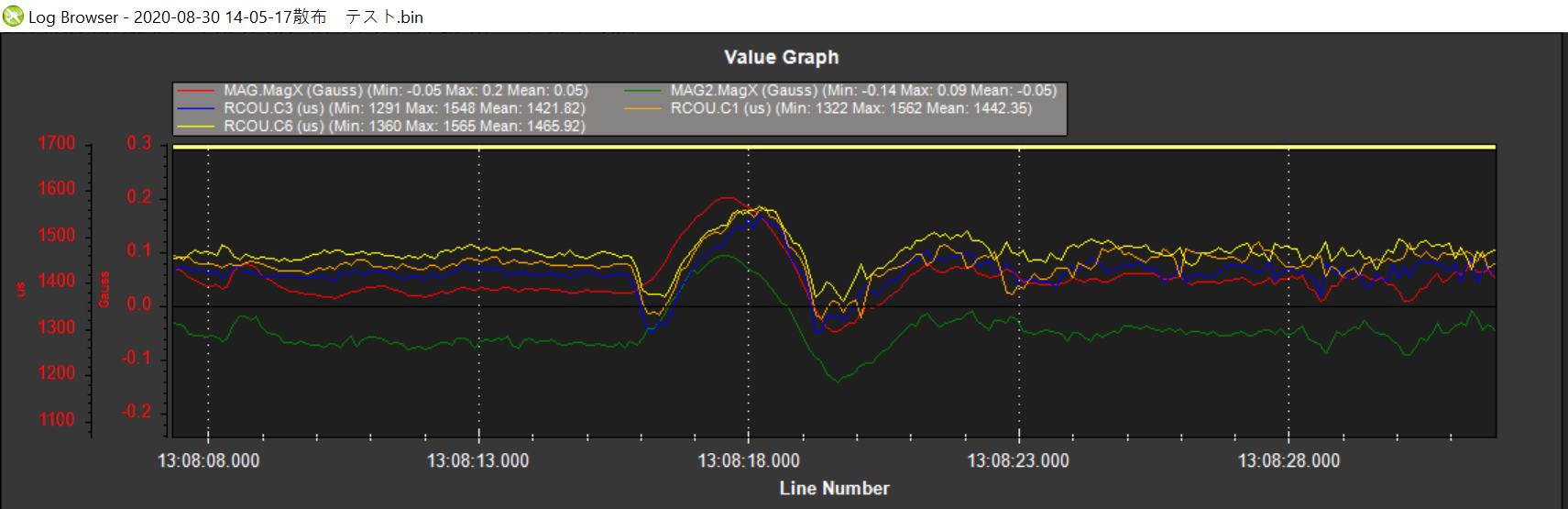
You may have a disarm log. Turn on the other mags. Spin you motors accordingly during the process.
You will see if the motors are affecting the compass measures.
This won’t solve anything but will help us to locate the problem.
You don’t necessary need to fly for Compass Mot. Just spinning the motors is already enough to generate data to determine the offset.
You may also try the new Automatic Offset Calibration feature
In your automatic analysis there’s a line Test: Event/Failsafe = FAIL - ERR found: FS_THR
Not sure if this bother you, but it tells you have some error related to throttle failsafe. Check your throttle trim or rc connection