here is issue:
Have you setup the CAN parameters?
https://docs.cubepilot.org/user-guides/here-3/here-3-manual#configuration
If yes, try to connect into Here3 via SLCAN and assign a new CAN node id.
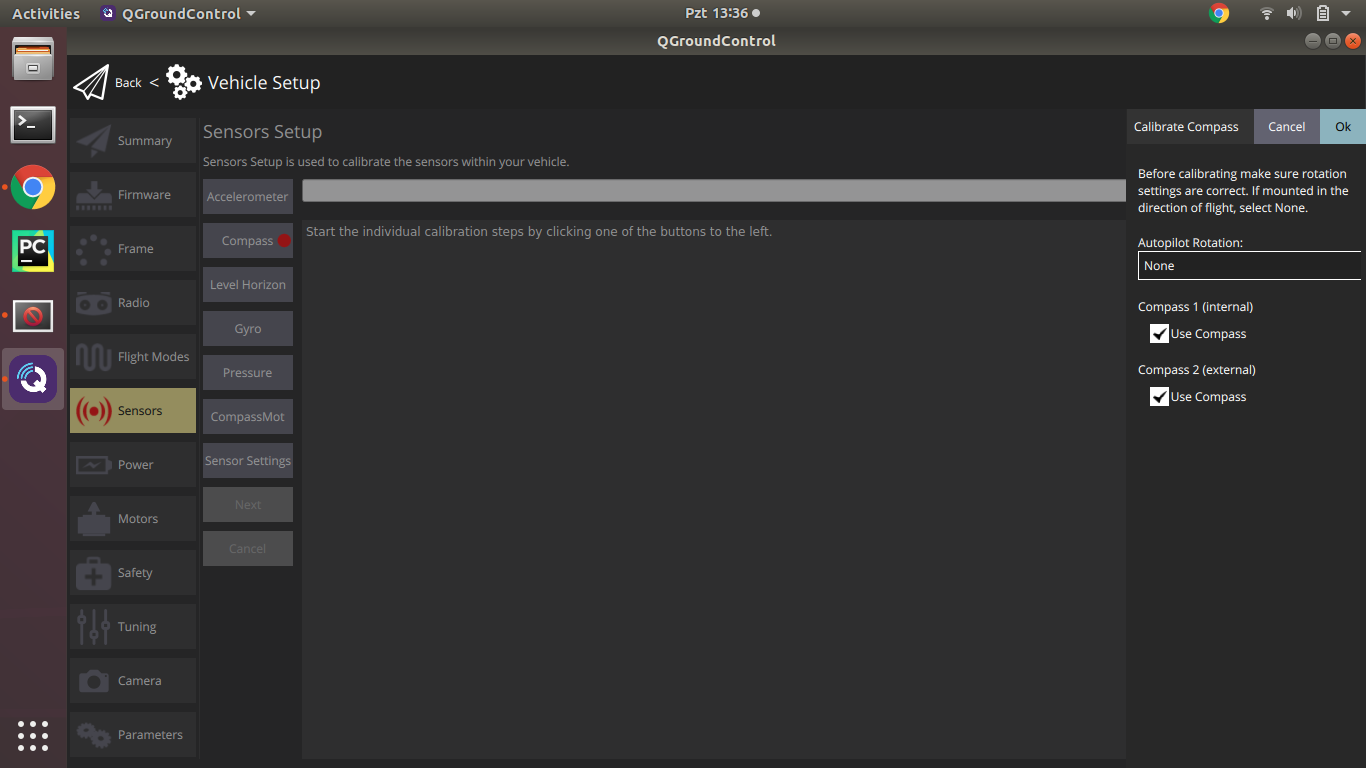
I can not see CAN params via qgroundcontrol (I use PX4) so I could not configure. What should I do?
Can you try loading Ardupilot into the autopilot and test it in Mission Planner? Just to verify if the Here3 itself is ok
What if it’s ok, what will I do?
Then we would know the Here3 hardware is ok. We will look into software settings
by the way my main issue still same. Help pls.
Can you verify if the motor connection order is correct?
https://dev.px4.io/v1.9.0/en/airframes/airframe_reference.html
Yes, connection is true.
In the px4 discussion, someone suggested that the copter was trying to keep/correct the yaw. Did you see the copter keep spinning in the HUD in GCS?
If not, there is no way the autopilot system was commanding yaw movement.
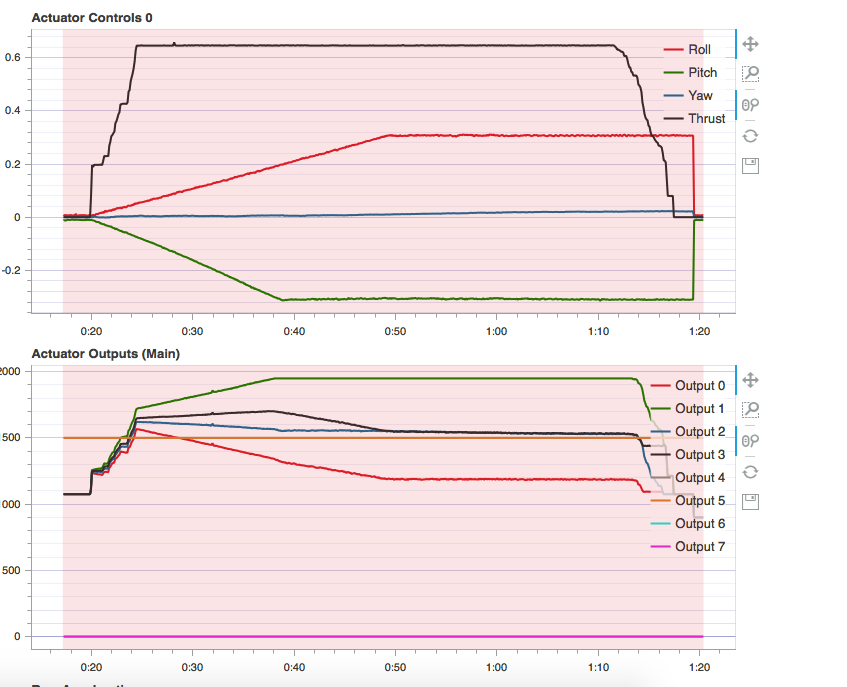
Yeah problem can be about yaw because in Servo Outputs Tap usually main out 1 and 4 goes high and 2 and 3 goes low. So what I should to do fix problem? it became a hard to solve problem for me. 
Can you try to re-calibrate everything again, then try to arm it without propellers? So we could see how they spin.
This is to verify if the position estimation is correct, at least on the ground. There is no way the copter still think it is spinning even when it is sticking on the ground
I did it already nearly 10 times. There is nothing change. Spins still were inconsistent when armed without probs. Problem could be broken gyro?
Can you share a disarm log?
Also, try to arm without Here3 and see if anything change
I uploaded PX4 firmware again and retry without HERE 3. Result is same. Here is log:
https://drive.google.com/file/d/1mwJs04F8BDvcw5qhnI31uZrg3JkqU8V7/view?usp=sharing