Hello,
We are using this cube orange for quite some time now and have used it in various frames of similar sizes for testing purposes and have performed well.
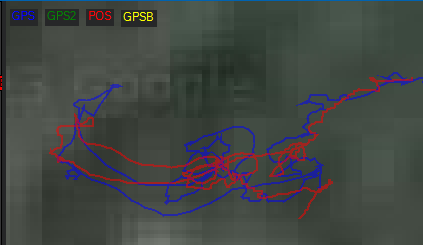
However, recently, while flying for one such setup, we came across a weird issue of yawing on the right automatically, delay in commanding, altitude changes, etc.
During the maiden flight with the same board, and same quad, the performance was almost proper and required a little physical balance change from our side.
Our flying mode was Loiter and this sort of issue I have never observed while flying in Loiter mode.
Also want to understand that, how close to the center is OK for the placement of FCB and GPS. In this one, we have had FCB and GPS 35mm (approx.) in the X direction from the CG point.
So in the maiden flight, the same was changed and made to 35mm in IMU offset.
On the next flight with issues, we tried both things, without offset and with offset, and the performance remained the same.
Additionally, out of the 3 test flights, in the last one, after landing, before the motor turns off, it automatically flipped on the back.
I would like to know the reason behind the issue.
And to know the offset requirements for FCB and GPS. Also, the need for Z value in GPS offset also requires an understanding. Because GPS is always at a certain height.
Logs link - Bin Logs – Google Drive
Thank you for your time and help.