Being a complete newbie with the whole RTK thing, after only a week of spending every possible free minute I have wrapping my mind around getting it to work first of all, and then doing some actual tests, I have come to this early conclusion.
Hardware -
Pixhawk2.1 Black Cube HERE+ RTK Rover 4.0
Setup -
I have managed to get a fixed base accuracy of 0.5m which took nearly two hours to achieve.
Rover -
The rover is taken from my hydrone AIMy and physically moved to set locations around my property with a clear view to the sky.
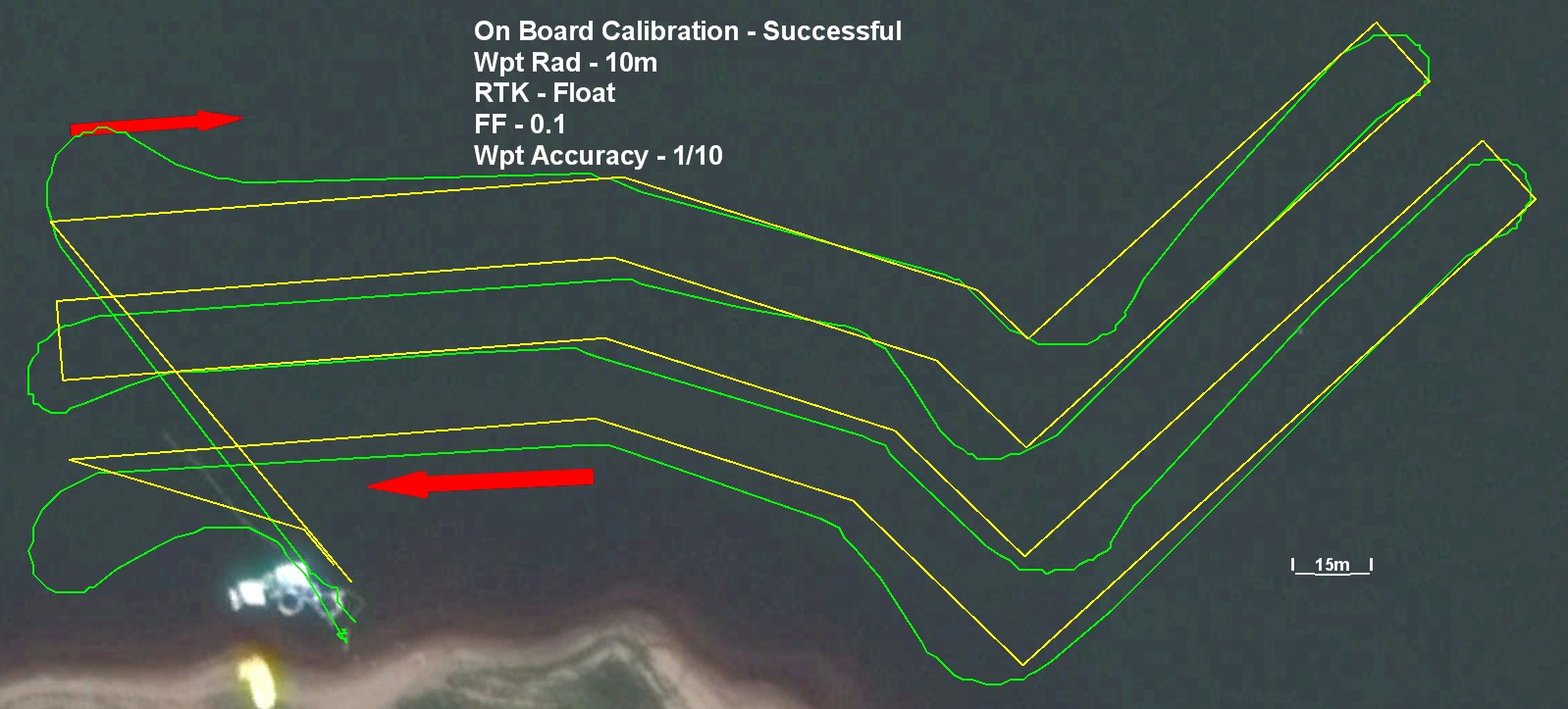
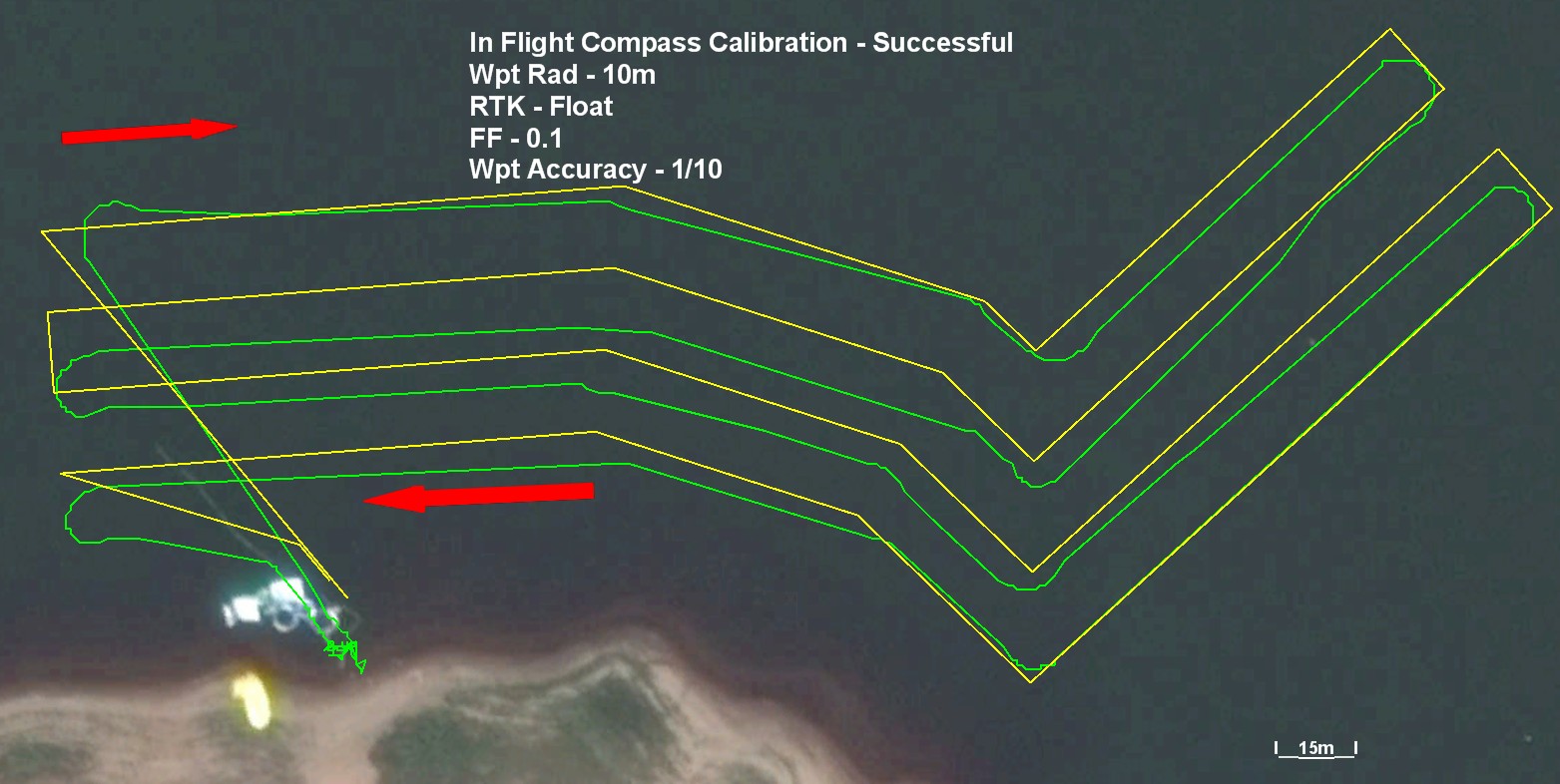
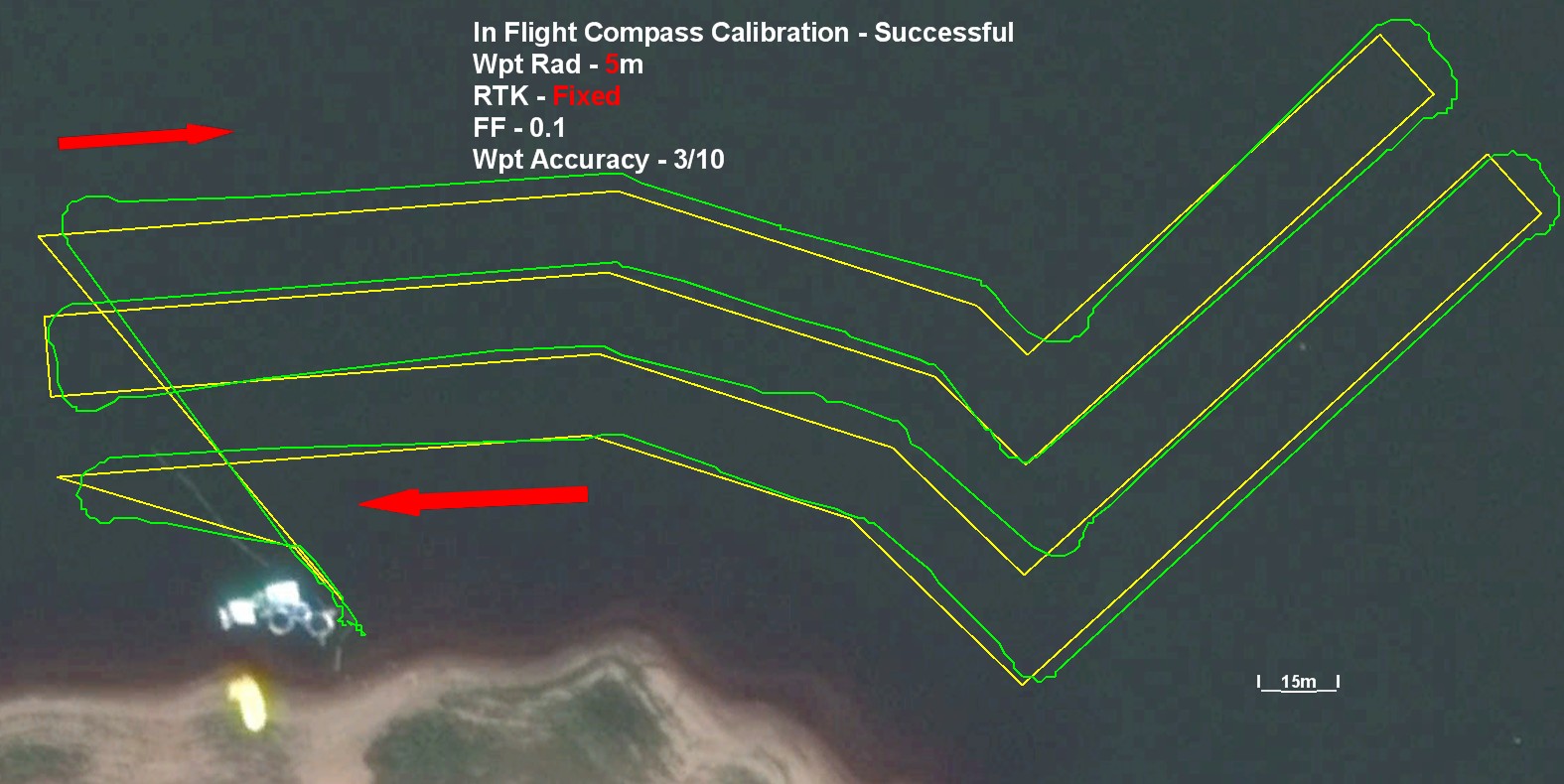
Results - HERE+RTK (0.5m)
a - At the moment the rover arrives at the WPT the accuracy to actual WPT is between 3.8 and 4.2m
b - After a while the location settles and pretty constant 1.3 to 1.8m accuracy is achieved
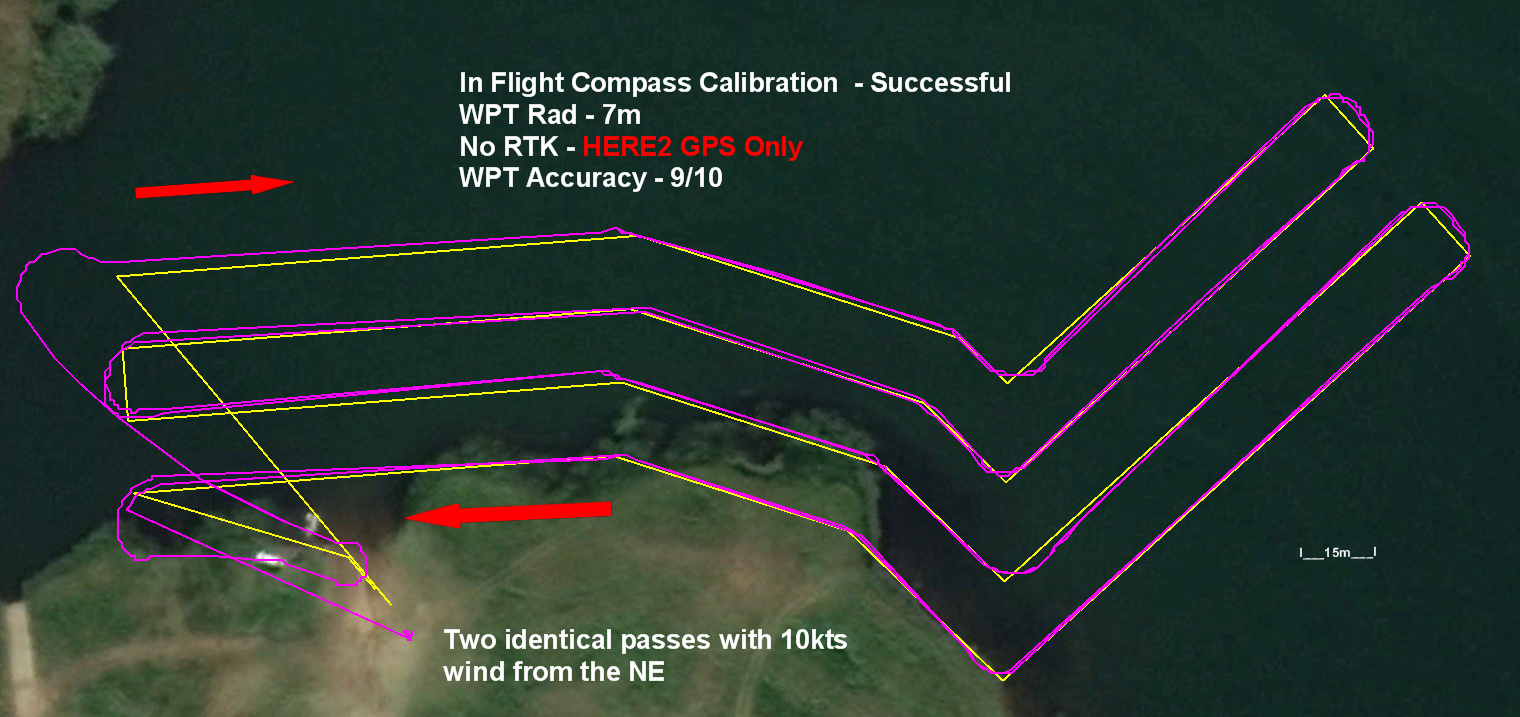
Results - HERE+ NO RTK (GPS only)
a - Initial WPT arrival accuracy is between 7.5m to 8.9m
b - After some time to settle the WPT location accuracy drops to around 5m
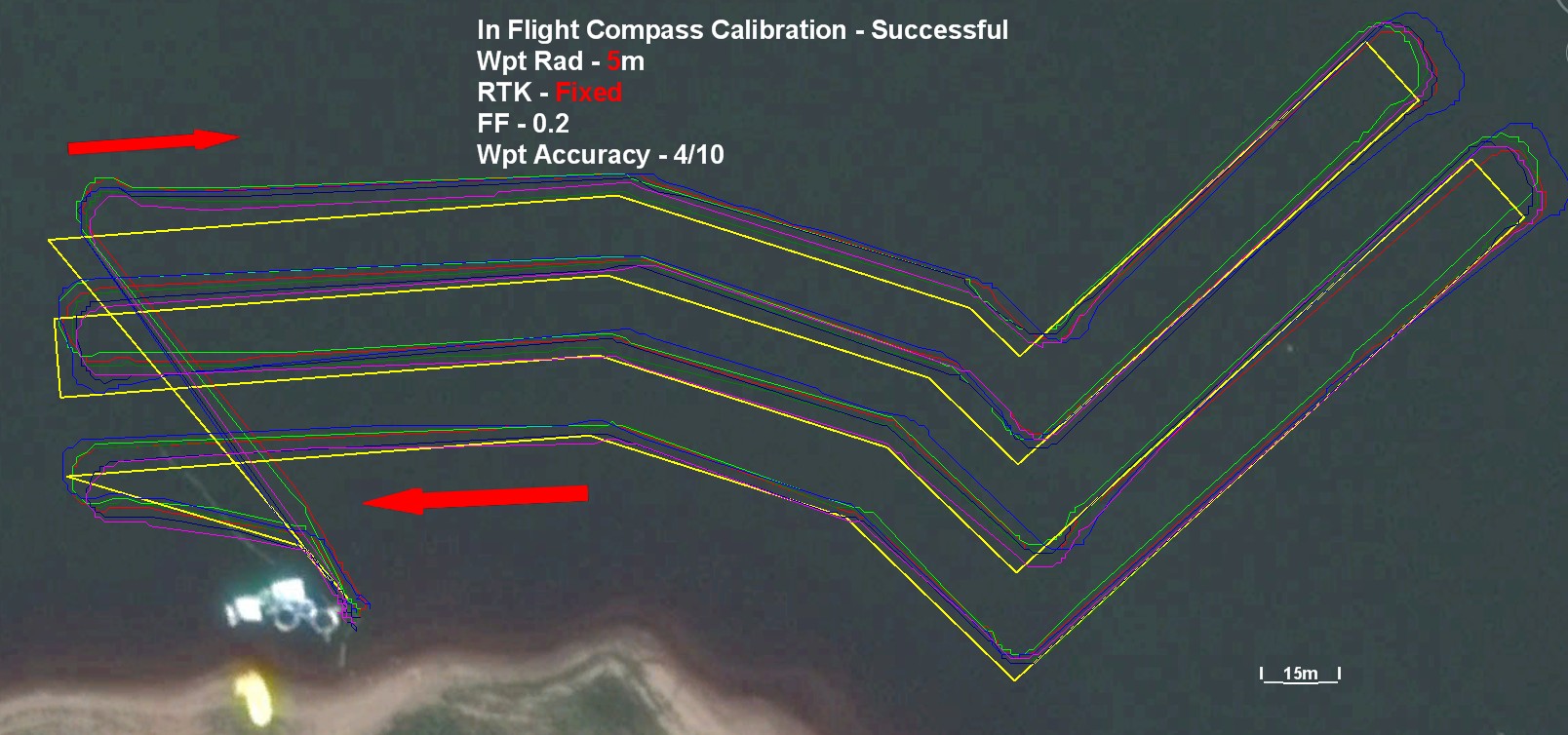
Conclusion (at this early stage of my journey)
a - The RTK certainly is more accurate
b - Considering that it is a rover and the craft cannot sit around waiting for the correction data to ‘settle’, the initial WPT arrival accuracy has to be taken so we are looking at around 4m for RTK and 9m for GPS only.
c - I find this extremely disappointing as the correction accuracy I was hoping for was the 0.5m immediately as the craft reaches waypoint after waypoint.