Hi everyone,
Today we had a “Yaw Re-aligned” after takeoff, during a pilot training session.
LOG: https://drive.google.com/file/d/1lY8S1yFkH-2_G-jdE1jrf3OiwSWrIA8h/view?usp=sharing
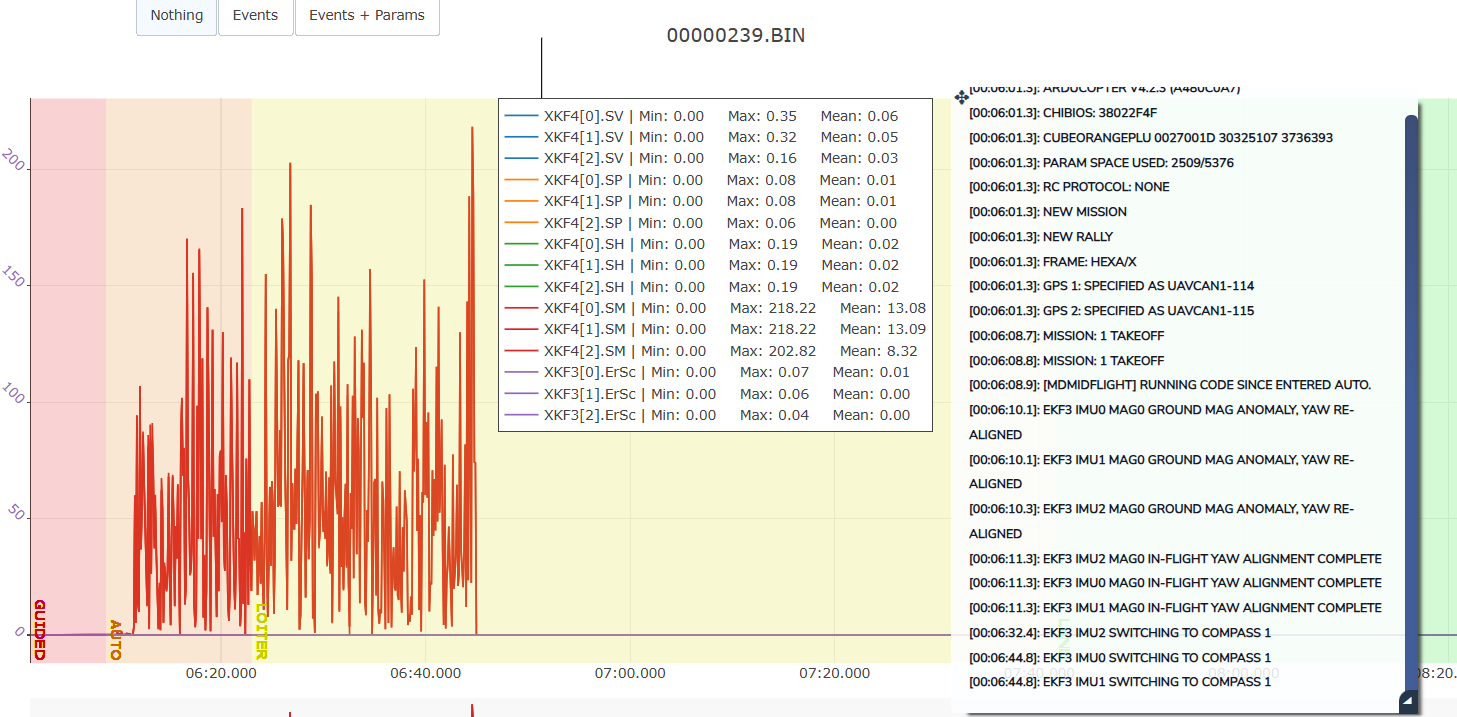
Checking the log, I noticed some insane values for XKF4.SM, and they suddenly go back to normal as soon as IMU0 and IMU1 switch to COMPASS 1.
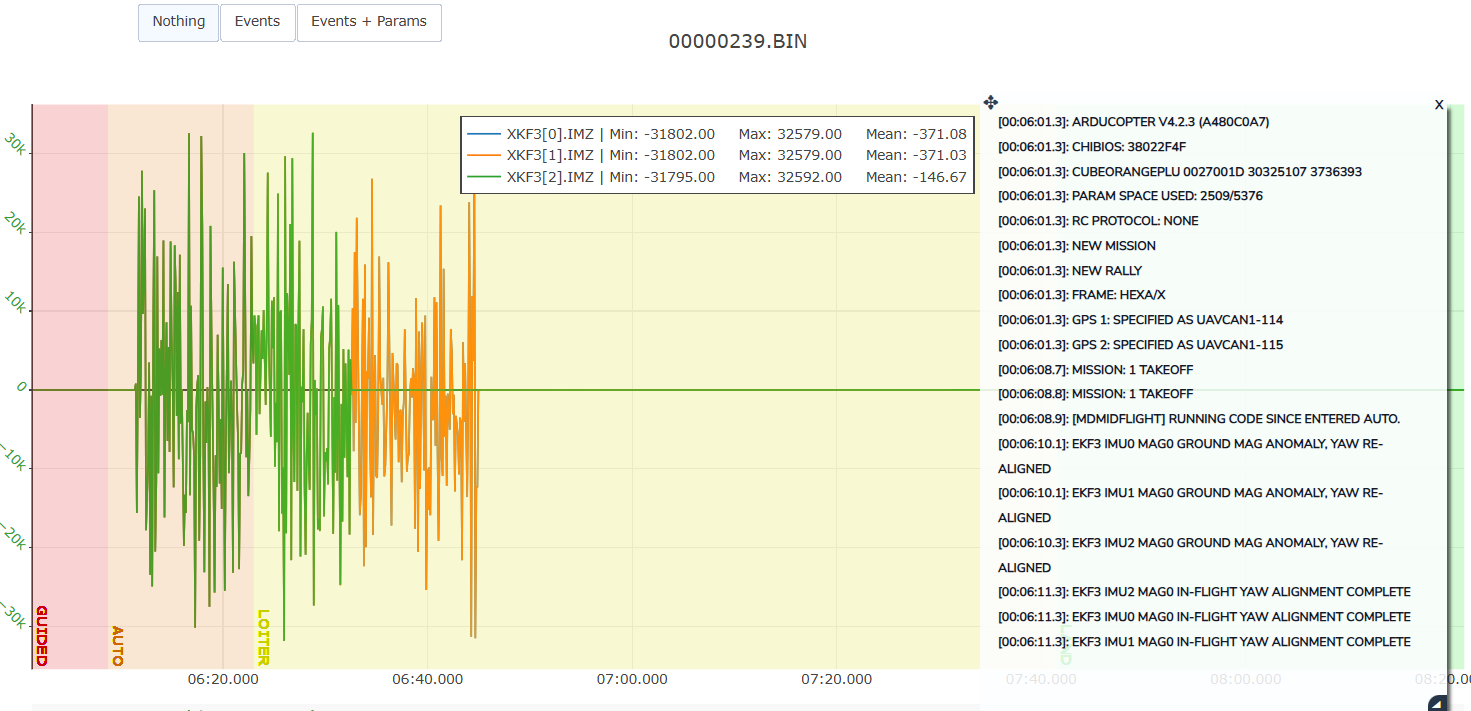
Digging a bit, I found that these crazy values came from XKF3.IMZ
Our setup:
Cube orange+
Kore Carrier Board
Dual Here4
25kg TOW
Considerations:
- In the previous reboot, there was a “pre-arm: Compass Not Healthy” that cleared after reboot.
- Previous batches of Here4 had cronical issue with the magnetometers failing. We are replacing all units with newer batches – the one from this post is a remaining from the olders. However, we have never seen a failure like that, causing such spikes.
- Several other flights were done taking off from the exact same place. No issues at all.
- Before you ask: yes, we are using a quite old FW version. The reason is that we have to conduct hundreds of software integration tests and demonstrations every time we update the autopilot FW, due to regulatory matters.
Questions:
- The Here4 compass issue is the most likely root cause, but could I be missing something?
- Why did it take SO LONG for the EKF3 to switch the compass source?