Hello,
Hope you can help me to solve a vibration problem with the Cube. First, I’ve been studying forums and social posts related to this issue. And CubePilot recommendations are always to hard mount the Cube, enable full IMU logs, and then perform a FFT to show what frequencies are affecting the autopilot. Then try to figure out what is wrong with the airframe.
So here is the data. You will find all logs and videos. Flights were done with ArduCopter 3.5.7:
https://drive.google.com/drive/folders/1T1DkT4Q8xplhWxkG4ReIPrOj4l3oRINR?usp=sharing
I did one flight with IMU1 only enabled, then one flight with IMU2 only enabled, then one flight with IMU3 only enabled, and finally a last flight with IMU1 and IMU3 enabled.
Flying with IMU2 only was very hard since the copter was “jumping” in the air. On the other hand, flying with IMU3 only was very docile, gentle, smooth. IMU1 was feeling ok, but Z-axis vibration levels for all flights seem to be high as well as clipping.
Would you explain why IMU3 feels to perform better than the other two? Is it true that IMU3 is not damped? The Cube is connected to a SpektreWorks carrier board, and the carrier board is mounted to the frame with 4 nylon screws. So, no foam, no tape, no damping, it’s hard mounted. Plus, motors are balanced as well as propellers.
Please, would you help?
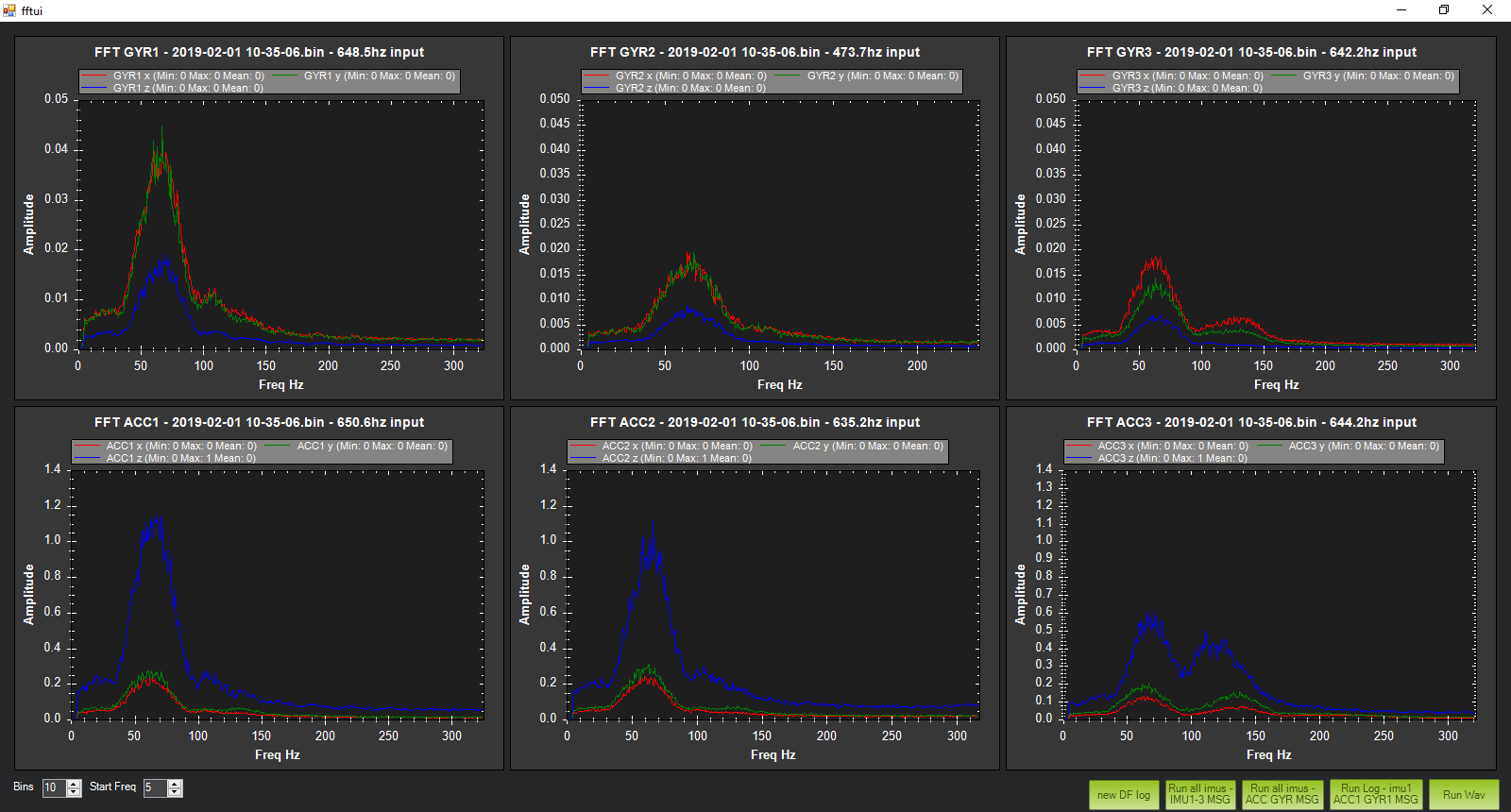
Unfortunately, I can only post one image here, the other charts are in the shared link.
IMU1 + IMU3 Flight FFT: