Hello,
I am using a Cube Yellow with a Mini Carrier Board and Here 3+ as a GPS. To update the firmware, you have to set the CAN-passthrough via the slcan setting in Mission Planner. Since the Mini Carrier Board only has a CAN2 Port to plug the GPS in, I did that. Now i tried to set CANpassthrough using the slcan connection, but the Here 3 GPS only shows up when using MAVlink-CAN2. I think the GPS should be connected to CAN1, but as mentioned, the Mini Carrier Board uses the CAN1 only internally for Ardupilot (which shows up in the slCan UI).
Is there a way to upgrade the firmware using the CAN2 or only CAN1? And if is only possible using CAN1, is there a different way to upgrade the FW?
PS: My SW Vesion is 1.3.4AB183F6 and I am not sure if this is the most recent version, since there are no listings online.
I was using CAN2 since mini carrier board has only CAN2 port.
As per above mentioned here3+ manual i was tried to connect with Ublox u center.
Here3+ internal parameters doesn’t have passthrough option 0,1 and 2 for various here3+ configuration as mentioned in the manual…
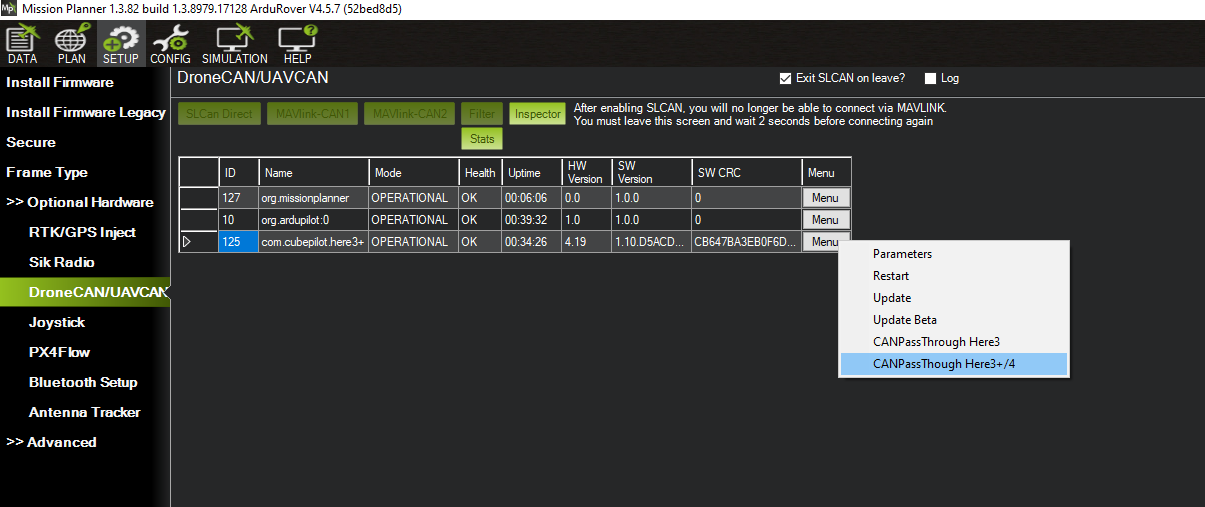
I also got frustrated searching for the passthrough parameter mentioned in the wiki, but apparantly they moved it out of the parameters list into the menu list as shown in the image attouched