Hi guys,
I’m interested in testing the Here 4. I’ve read that there’s a PPS output but I’m wondering how can we get access to it?
Best regards,
Cedric
Hi guys,
I’m interested in testing the Here 4. I’ve read that there’s a PPS output but I’m wondering how can we get access to it?
Best regards,
Cedric
Bump on this! I see the breakout pin 10 has pps. Is this accessible and does it require special firmware?
Yes I saw that too @Andrew_Gregg ;).
So the first question is to know if by default the pps is available in that pin, and the second question is how to open the here 4 (I did not make any research on that) if we want to connect to the PPS. I have not bought any here4 yet, but I’ve seen it comes with a cable which has CAN and UART(I2C) output. So we we can open easily the here4 (what about the IP rating after opening) it would be fairly easy to modify the existing cable to connect to the PPS…
@cedg507 The PPS signal is generated for every solution. You will need to open the Here4 to connect the adapter board. To open the Here4 ensure that you use non-metalic softer tools.
This is an experimental operation and any damage to the module in the process of opening is your responsibility. Saying that the best strategy is to start from the corners where the LEDs are and start prying the lid open. There are clips all round the case, you will need to circle through gently opening each clip.
Also note that with latest firmware Here4 publishes timesync message synchronised based on the PPS signal, and transmits the timestamp synchronised to GPS time.
@sidbh I need to change PPS Pulse length and mode, but I have some issues:
Can you tell me how PPS signal can be restored on the PPS output of Here4 with custom parameters?
@BB8 Software automatically configures the PPS pin, but when you are in passthrough mode via Mission Planner to U-Center, the pin will not be configured, as it locks out the firmware from talking to GPS. I have verified the latest firmware seems to be setting up the PPS pin fine. Have you checked if PPS pin triggers show up couple of seconds after boot, without passthrough to u-center.
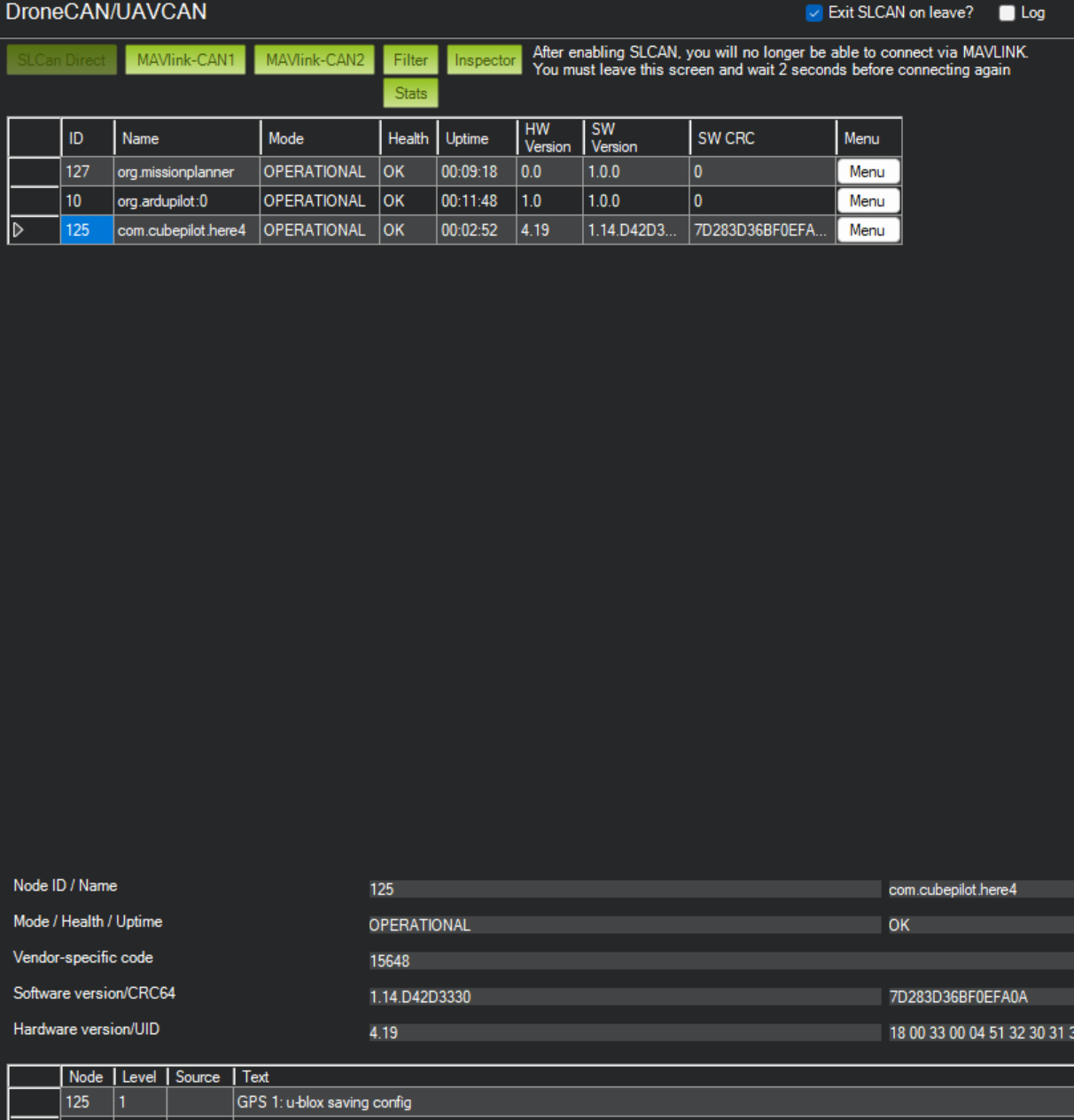
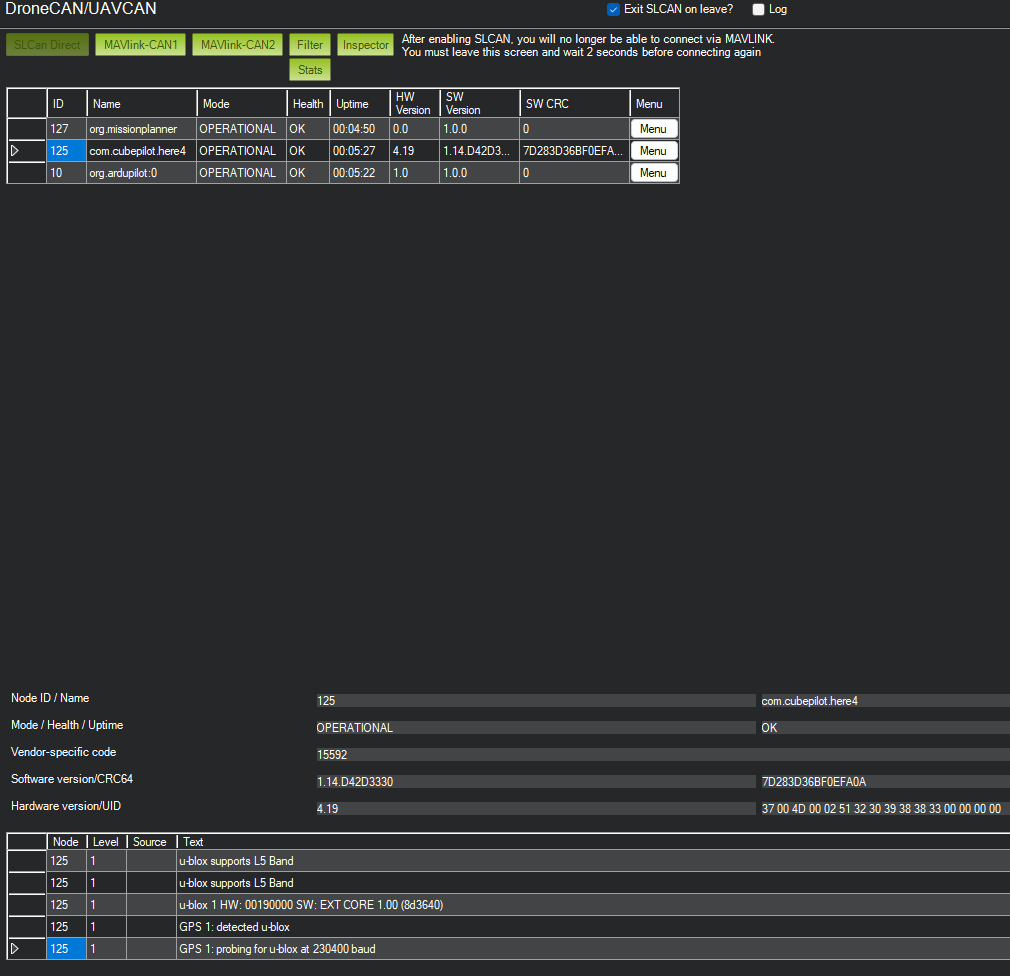
You can wait for ublox saving config show up on the DroneCAN panel like this
after this I believe the pps config should stick.
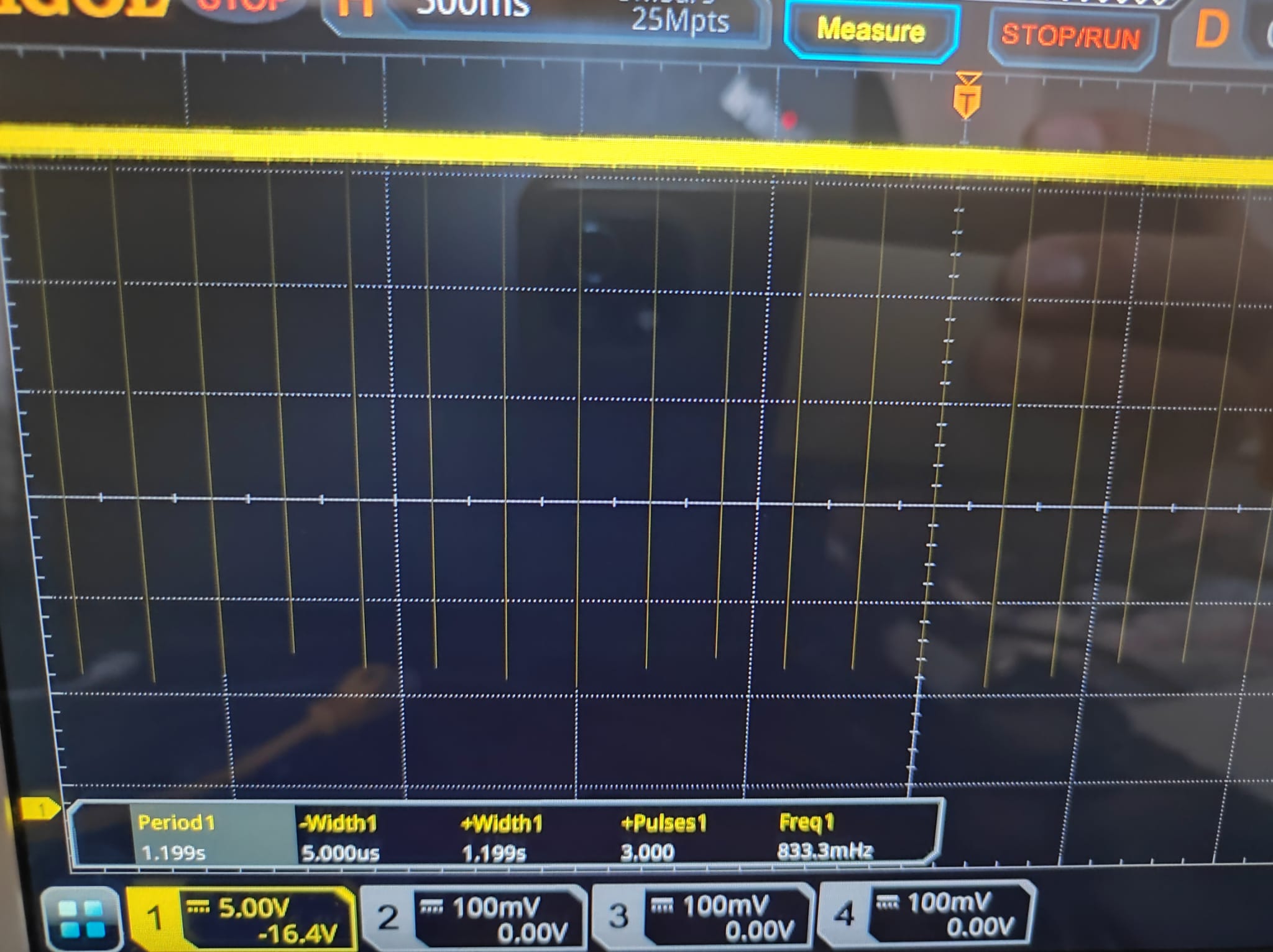
@sidbh after the firmware update PPS signal looks like this:
I checked the osciloscope signal on PPS output without connecting the autopilot to PC. Nothig changes regardles the connection to the Mission Planner.
I tried Here4 update again but nothing changed.
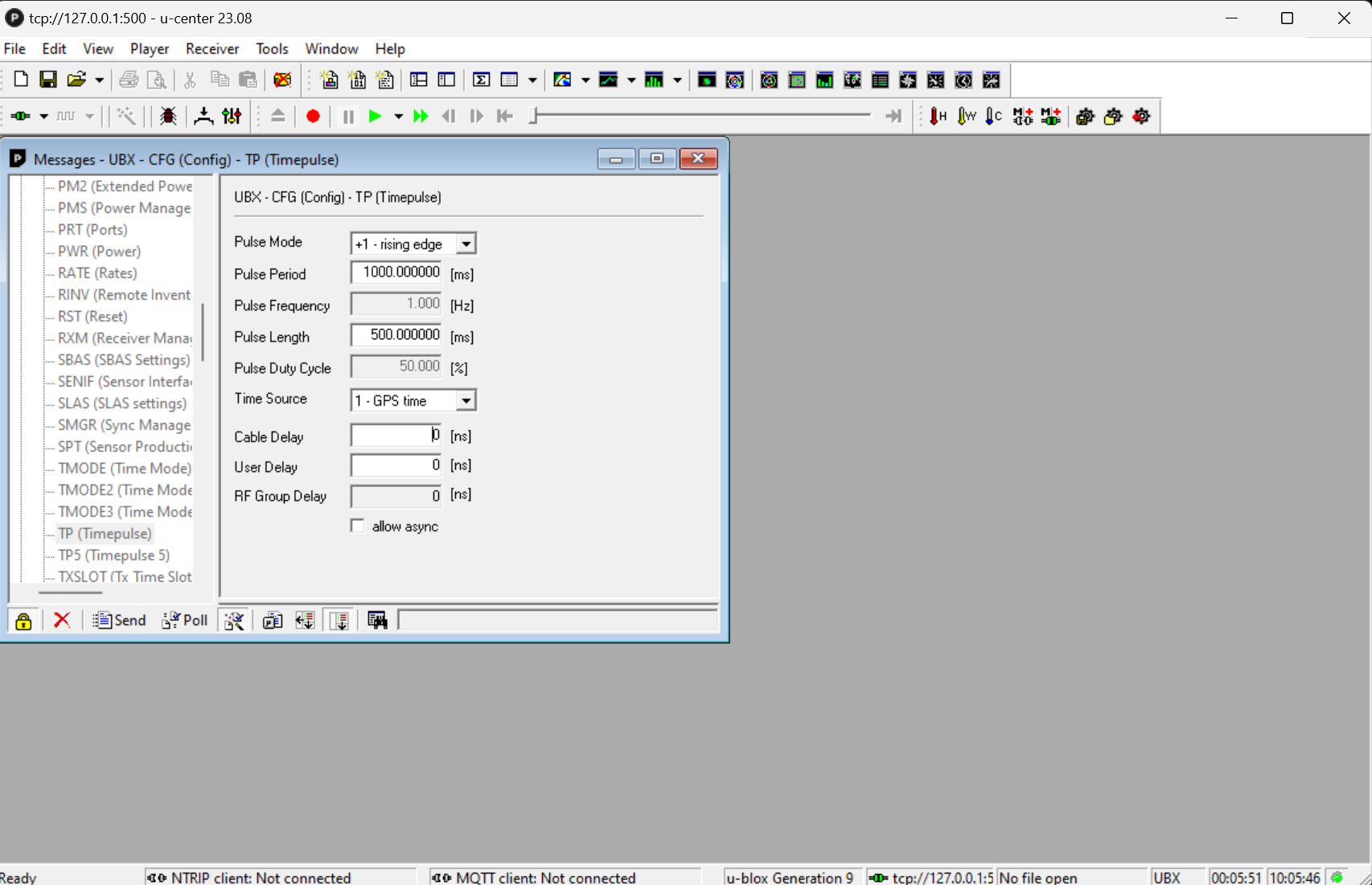
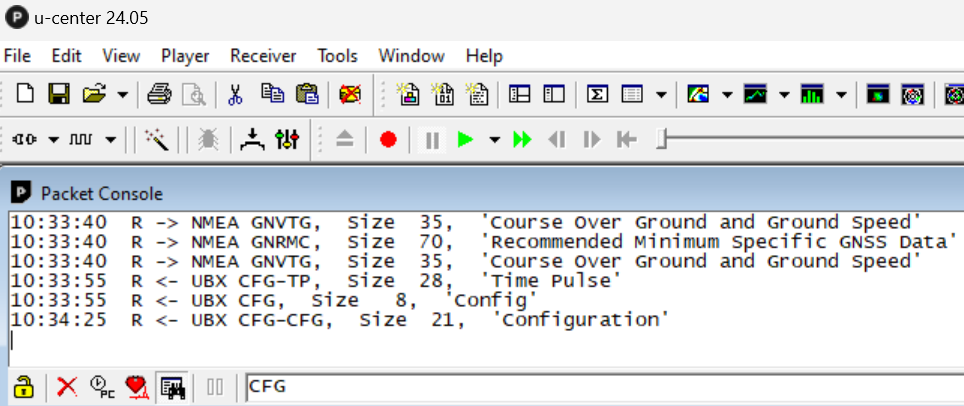
I try to change GPS parameters in u-center like this:
In messages view I change Timepulse to Pulse Lenght 500ms.
I click Send button
TP message in left view changes to black from gray for a short time and then return to grey.
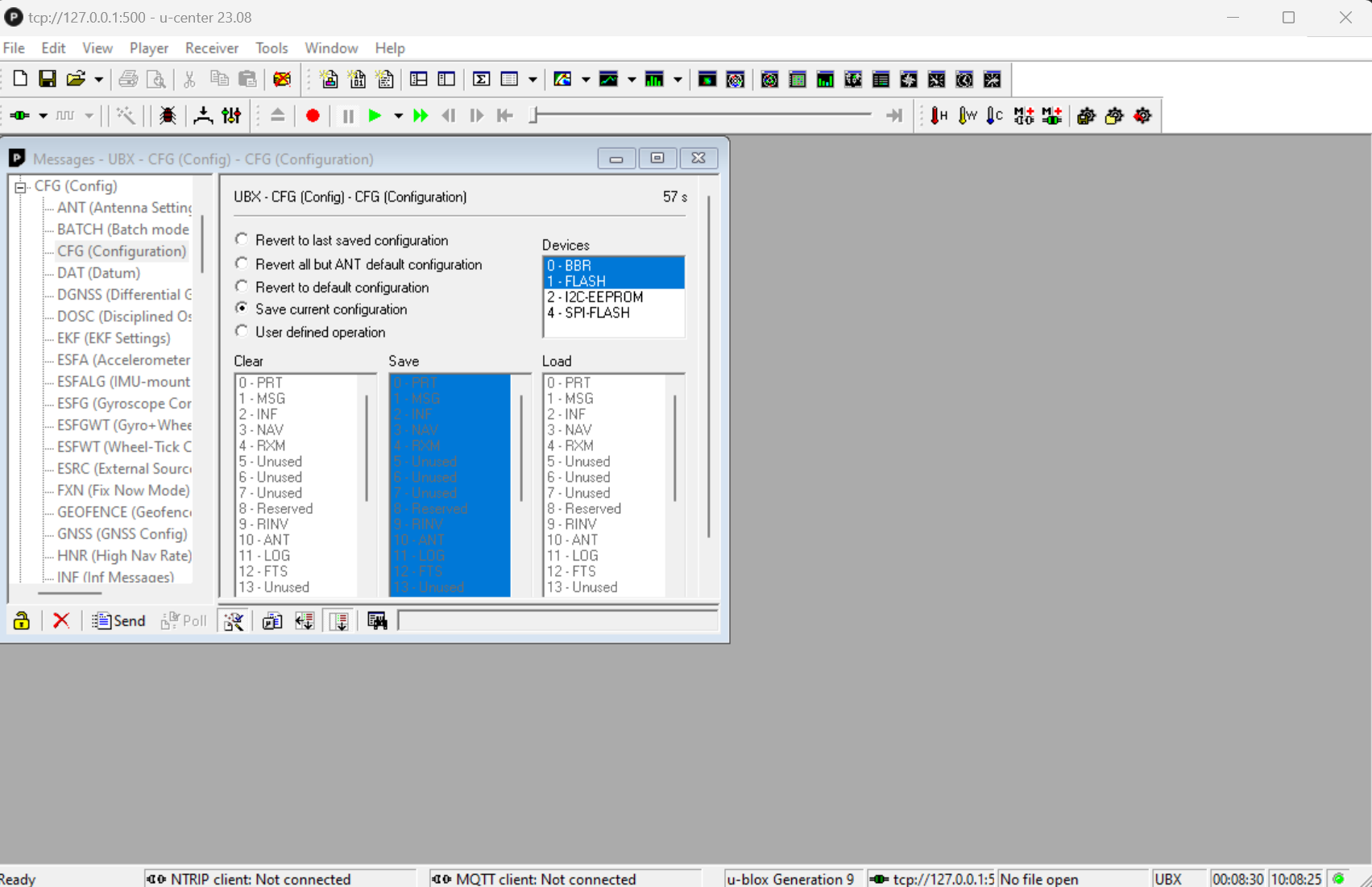
In UBX-CFG-CFG I click Send with save current configuration
CFG message in left view changes to black from gray for a short time and then return to grey.
In Packet Console there is confirmation that the data is sent.
I don’t get ublox saving config on the DroneCAN panel:
Nothing changes on PPS output.
Is there any possibility to restore factory default setings in Here4 or downgrade the firmware manually?
@BB8 the PPS output period is being configured by the firmware to be in sync with NAV solution which is 5Hz, this is used for better timekeeping. Changing this config in u-center will not do anything, as it will be reverted back to default config.
If you need to do custom config for PPS through u-center, you will need to disable PPS in the firmware. Set this to false, and build firmware GNSSPeriph-release/Here4/hwdef.dat at release · CubePilot/GNSSPeriph-release · GitHub.