i will be changing the default elevation mask for the here+ in MP to 15 degrees. and am looking into adding the snr mask as well
1 Like
Thank you for your interest in the work I am doing!
I will get to the point and then probably lose some readers interest. I am not a writer or teacher at all so I’ll apologize at that.
15 deg / 35 snr is best for 100% open sky. Most of us work in less than 100% open sky, limiting sections of sky needed for triangulation checks to get fixed using a safe 15deg mask. To qualify: I have not had luck getting fixed at 15deg from my bench test in my neighborhood.
13 deg / 36 snr works much better on my bench having an estimated 70% open sky. I lowered the mask to allow a higher sv count and bumped the SNR up a notch to block poor reception through trees and lower sv’s.
The accuracy between the two settings after 4 hours & 10 reboots each was not noticeable. The amount of fixed time with the lower setting was greatly improved however the float solution from both settings was 90% right on with fixed solutions. Repeatability between boots was not good at 2 feet X&Y and 15 meters Z, even when fixed. I wish I had better results but…. Moving on
Once fixed of floating for a few minutes relative X,Y errors can remain below .25 feet and 2 meters Z. for all 30 minute test. This is a correction from my previous post of .15m in 20 min.
Still I am very happy with the X,Y for my work
So the Z (elevation) is not good and cant be used but before you jump to a F9P thinking its going to be great, I see one thing to be worked out in MP.’
The ellipsoid and geoid models need to be defined to use geoids 2003 & newer. Otherwise what are we using? I have not pinned this down exactly, but something is defiantly wrong with the elevation at the base vrs the rover. Even if the base is an ellipsoid height & not the MSL elevation I measure 7 meters off. As it looks in MP its 24 Meters relatively off (confused so am I now). I have my rover 2 meters below my base and the rover position in MP shows 22 meters higher.
The difference between ellipsoid and geoid is 17+/- meters where I am testing not 24M so again I am confused!
Perhaps I am just new to MP, but in other GPS software I have used to get accurate elevations I need to define a geoid model based on zones, example: I am in zone 6 geoid 12b. Also this could be a UBLOC setting but before we can say CM accuracy we need the geoid defined.
I like the idea geoid 2003 because it covered the entire conus US territory and geoid zones were not as necessary because there was much less data in 2003 vrs 2012b. Still between the two geoid models It’s millimeters. But I am sure updated geoids could be used in MP however confusing to the layman GPS user.
Final Tip: If you do not get fixed after 12 minutes REBOOT and try again. Don’t sit for 20 minutes wasting time. These things get confused sometimes and need to start fresh.
Now that I have run the f9p through a few fixes most under 1 minute but vertical is not much better. I am still getting over 1.5 meter repeatability. FYI Set @ 13deg no SNR adjustment.
The vertical results from fixed positions (m8 & f9) are not good and wander. I wonder if MP is using the barometer and not the gps elevation? @Michael_Oborne.
EDIT : I found my answer
I have the same results in Ucenter so its the GPS reporting the elevation.
I am interested in you testing and results, may I contact you OR would you contact me? I have been working with the M8P for some time and would like to ask you some questions.
Sure , look for Bear Creek Land Surveying in Denver CO.
1 Like
Anybody have any luck?
I’ve been experimenting with the Here+ V1 system, but have never reliably gotten a fix.
It did momentarily get a fix once, but never achieved it after that. Nothing changed though, which is weird.
99% of the time it’s on float.
Anybody have better luck with the V2?
I have the same thing with v2: I got a fixed solution in the very beginning for a day or so, and until then I always have float… Also a bit disappointed.
Getting a great fix is very much affected by the reliability of your base station… please make sure the base station antenna is placed high, and clear of all buildings, or trees.
On your vehicle, mount the GPS away from all sources of potential interference.
@philip, does it exist a parameters list to optimize the RTK settings ?
Not really. It’s more about the environmental issues than parameters.
The default ardupilot and mission planner config of the uBlox is perfect
1 Like
Hi, I think there will hardly be a copter that has the GPS more separated from interference than mine… :
https://www.optolution.com/en/service/wind-measuring-drone/
Also, the base station antenna is on a tripod at 2 Meters height, and with 2 meters separation to other electronic devices.
In the first days, I got a RTK fixed solution on our parking space, now I never get a fix even when I am on a wide open field with no trees in 50 meters distance. AFAIK, nothing changed until then. But I will check everything in more detail, the problem is I don’t know how to find out if I am getting closer to getting a RTK fix or if I am optimizing in the wrong direction…
@William
Try a 13 or 15 deg elevation mask on the copter GPS. Ublox default at 5 deg is too low for RTK.
If it will not fix after 12 minutes re boot the GPS,
I have some other parameters above in this post that work well to get and hold a fix.
1 Like
I cannot get RTK - Fix, no matter how long I wait
I have used base both single frequency and Dual frequency GPS both way I am unable to get RTK fixed status , I think if you get RTK float status its ok,If you keep your drone steady for long time then you will RTK fixed status
but when drone is moving It is not easy to get RTK fixed status in single frequency GPS
You provide RTCM3.2 correction using Dual frequnecy GPS then You will get Fixed status fast but as your drone start flying you will get RTK Float .
Yes, I am starting to come to the same conclusion.
Not sure what this means - “You provide RTCM3.2 correction using Dual frequency GPS”
RTCM3.2 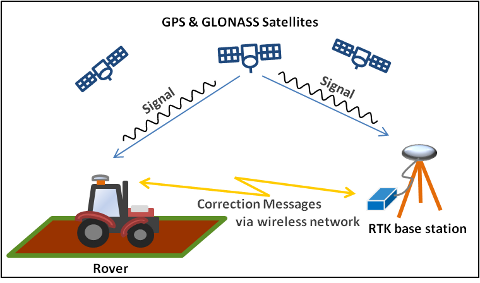
Radio Technical Commission for Maritime Services (RTCM) provides the correction message from the base station. This differential technique is also used in real-time kinematic (RTK) navigation systems.
Oh ok, I thought that IS what RTK was.
@Michael_Oborne did you finally change the default elevation mask to 15 degrees and changed snr mask as well in arducopter firmware for Here+ ? Is that changed in current 4.3.3 firmware ? I am asking because I can’t get RTK Fix (only Float) even with NTRIP corrections from Mission Planner.
yes its been changed for some time
1 Like