I updated my Here2 today switching from I2c to CAN.
I now have 2 issues to solve, both pre arm fails, compass calibration, and safety switch.
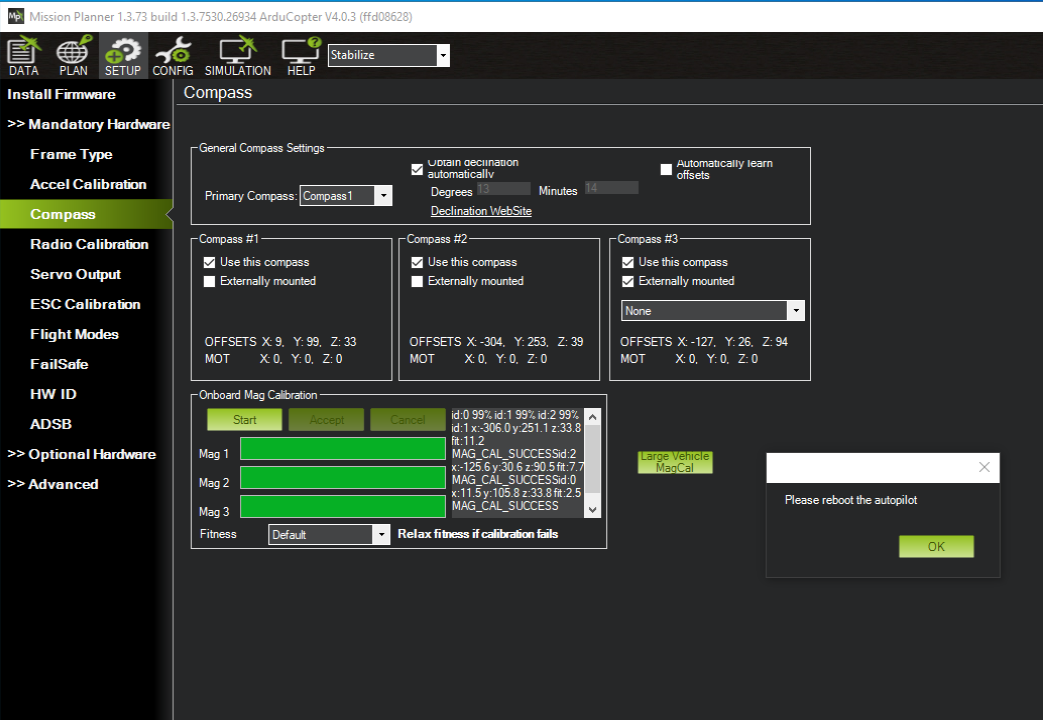
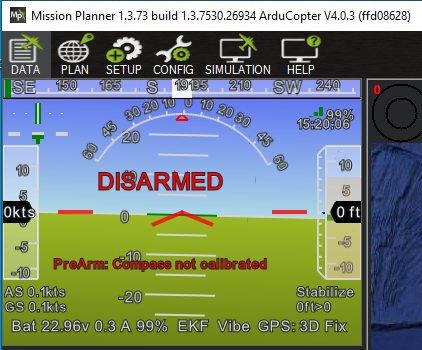
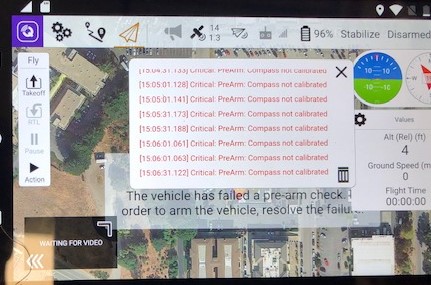
Compass calibration: I am running the black cube and when calibrating in Mission Planner all three compasses are found and I can calibrate them. After I reboot and connect via QGroundControl on the HereLink I get a prearm failer stating compass calibration failed. If I go back to Mission Planner and uncheck the “Use this compass” box for compass #3 (the Here2) the prearm compass calibration fail goes away. I have also tried calibrating via QGroundControl and though it completes the calibration, I still get the prearm failure. I would prefer to use the Here2 compass…what am I doing wrong?
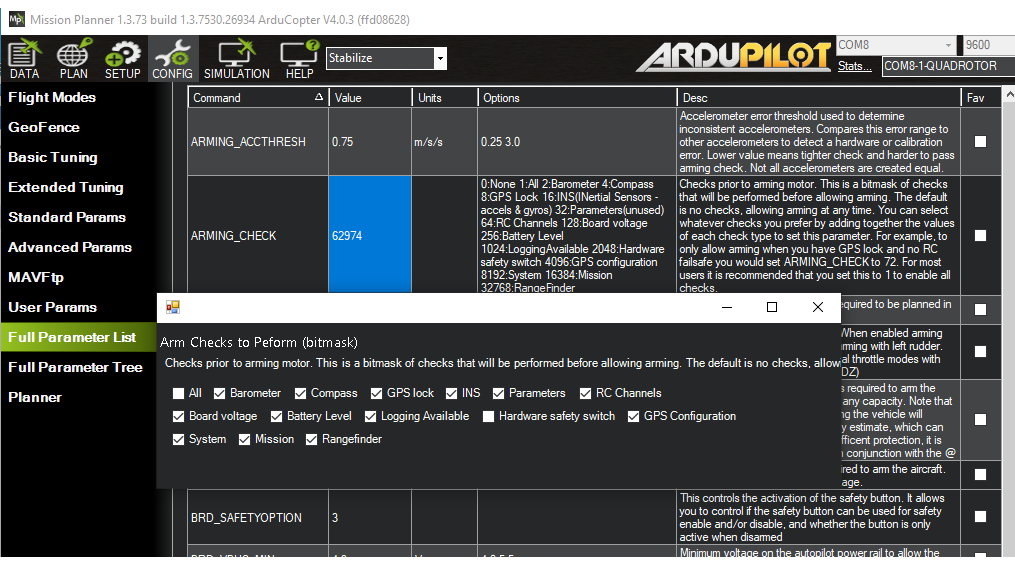
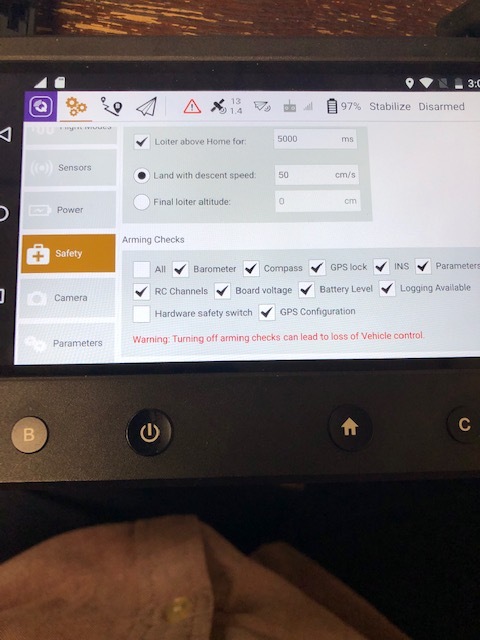
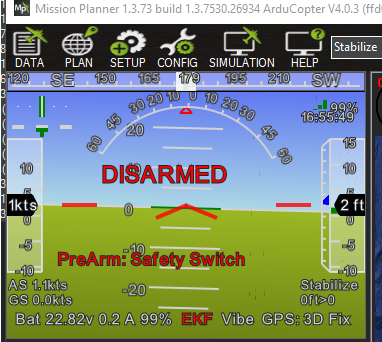
Safety Switch: I am aware that the safety switch on the Here2 is not operational while utilizing CAN. I’m good with that as I’m not a fan of the safety switch concept. I have changed ARMING_CHECK switching from “ALL” to checking all the other boxes except for “Hardware safety switch” which is unchecked. I did write the params change and rebooted. When I try to arm via QGroundControl on the HereLink I get a prearm safety switch error. Checking the safety options in QGroundControl the hardware safety switch is unchecked in the Arming Check section. Have I missed something in the parameters to cause this failure?
Here2 compass become compass #0 when it is connected. Ardupilot automatically select external compass as primary compass.
Take a screenshot of your error message if possible.
Safety switch on Here2 is not available via CAN. You may disable the safety switch from arming check, or using an external safety switch
I can use an external switch to clear the failure but I do not want to use a switch at all. Why does it fail a prearm if it is configured not to be checked in the first place?
Please let me know if you need any further information or screenshots.