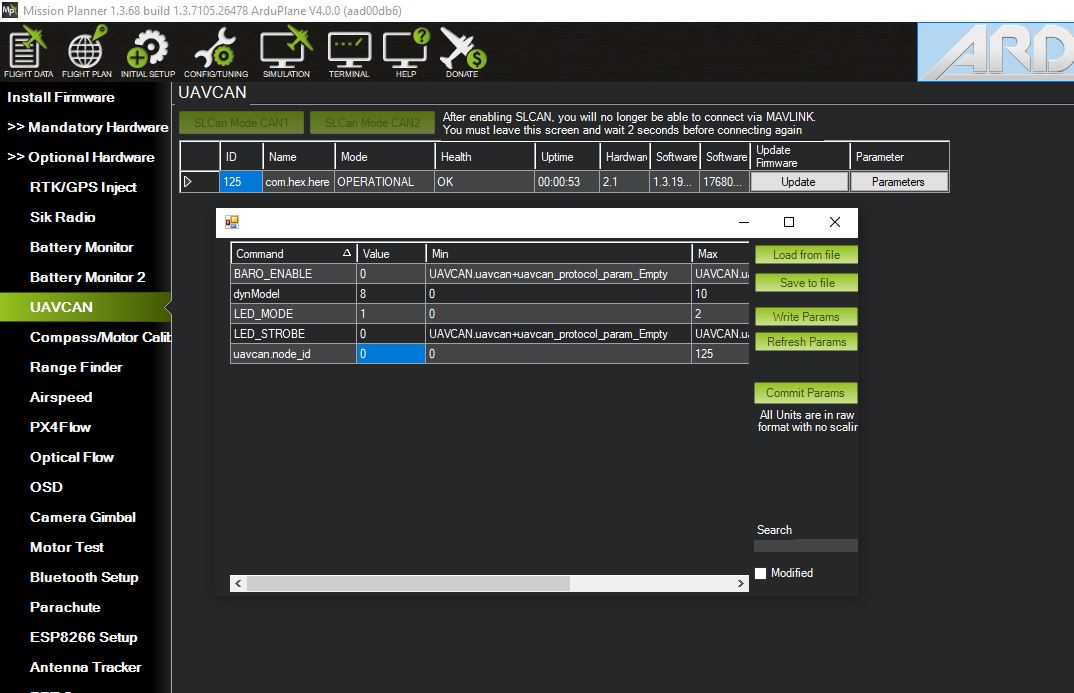
As for the Baro CAN is not Supported properly yet so disable at this time.
On the compasses in the current release the CAN will always come after internal or serial. I would disable the two internal via the mask. You can use the guided options in Mission planner to unselect the the others rather than use the number.
Same stands for the Led use the tick boxes in MP to enable CAN LED.
Sorry, do you want to say something connected to the Cube that is interfering in the HERE2?
Yes, I carry a Dragonlink Rx, but the antenna is on the wing
yes it works with plane 4.0.0 with 2 x Here2 gps units
i just cant arm it because there is 4 compass so when you calibrate in mission planner it only does 3 of them so one is left out so it will not arm i get message compass not calibrated
Use the Compass mask command ti disable the internal ones. Also note duel can mag is not fully supported yet. I’d recommend only using one right now and disable the rest
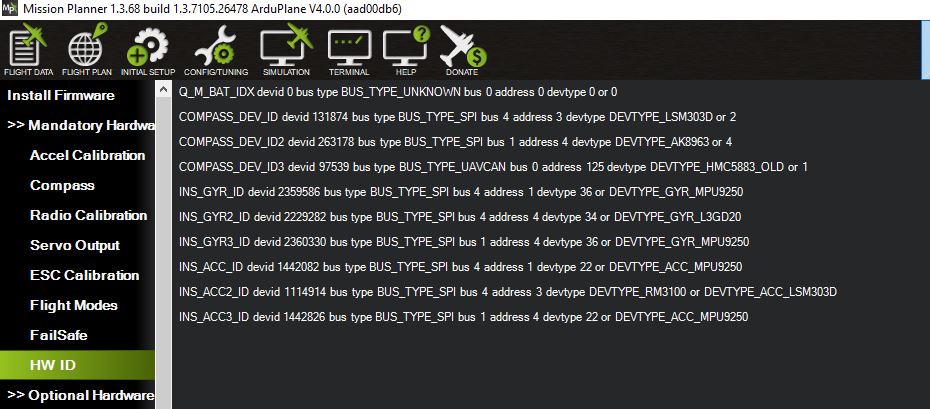
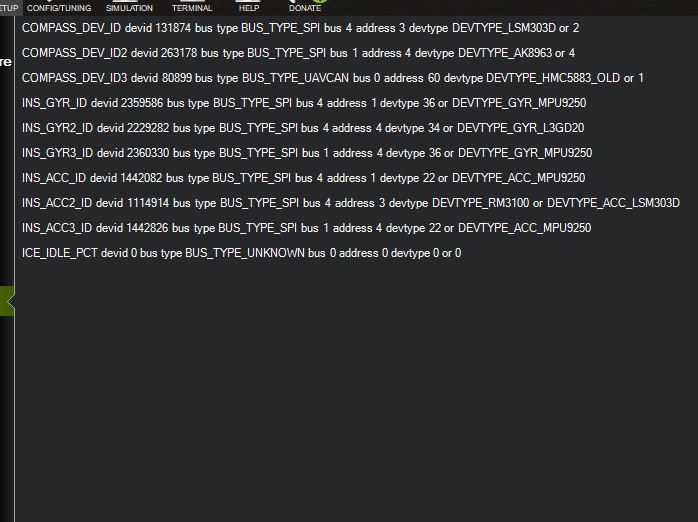
I still have a doubt. You comment that for the moment until a new arduplane update when we connect the HERE2 via CAN, it place the compass as a third compass, as we see in the previous image.
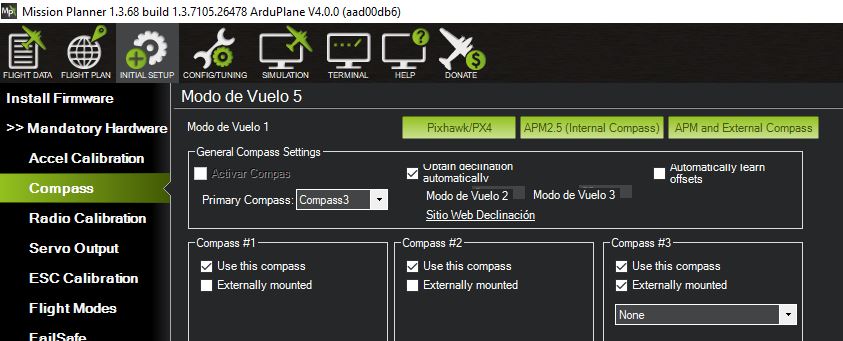
But in Initial setup> Compass, should we select it manually as in the image below? Because choosing only the external compass with COMPASS_TYPEMASK = 63487 and you perform a compass calibration, then the values of offsets that change are those of the compass #1 (no compass #3).