Your Vcc (5 volts) is constantly low, around 4.7v. I’d say it needs to be around 5.2 or 5.3 to be reliable.
See this article: Big GPS Round Up - Blog - ArduPilot Discourse
…and that’s just considering the GPS supply. Personally I wouldn’t trust 4.7v to run anything designed to run on 5v, which is just about every flight controller and add-on device we use.
You could set this as insurance:
BRD_VBUS_MIN,4.9 (or more)
Also you could try setting these to improve the GPS reliability:
BRD_BOOT_DELAY,5000
GPS_GNSS_MODE,67
The boot delay ensures the GPS unit has booted and is ready to be assigned an address on the CAN bus - if you are using CAN mode.
That mode setting ensures you’re only using 2 constellations and the GPS will be capable of supplying a suitable update rate. It is maximum 5Hz for 2 constellations and Ardupilot expects a minimum of 5Hz. The default GNSS mode setting allows discovering much more than 2 constellations and the update rate can go right down.
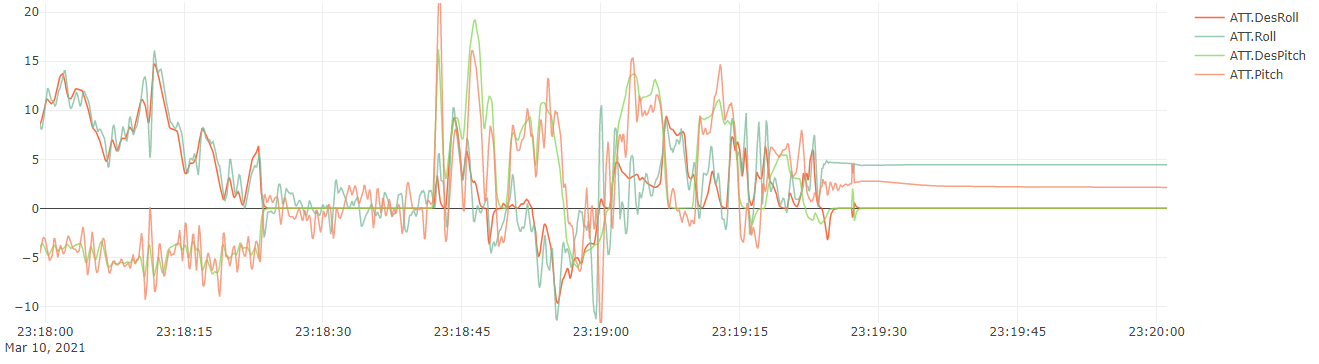
You have some attitude control/tuning issues going on there too, particularly during descent. But that can be a different discussion.
@xfacta
VCC was checked using a multimeter, and proved to be 5.3 but this is interesting. (it was provided from two 5v sources via a schottky diode.)
yes, it was a a it wobbly during descent, I attribute it partially to big props and low load. (and PID’s could be better…?)