i have been using two here4 on my vehicle.i knew each here4 has 2 compasses inbulit so its totally 4 compass. Ardupilot can support only 3 compass at the moment.However i found that each boot of Cube & Here4 the compass shows missing and some time its shows.
I have tried Cube Parameter BRD_BOOTDELAY = 5000
Here4 Parameter COMPASS_USE2 = 0 (default is 1)
evenr though with above parameter both the compasses was present on the next boot.
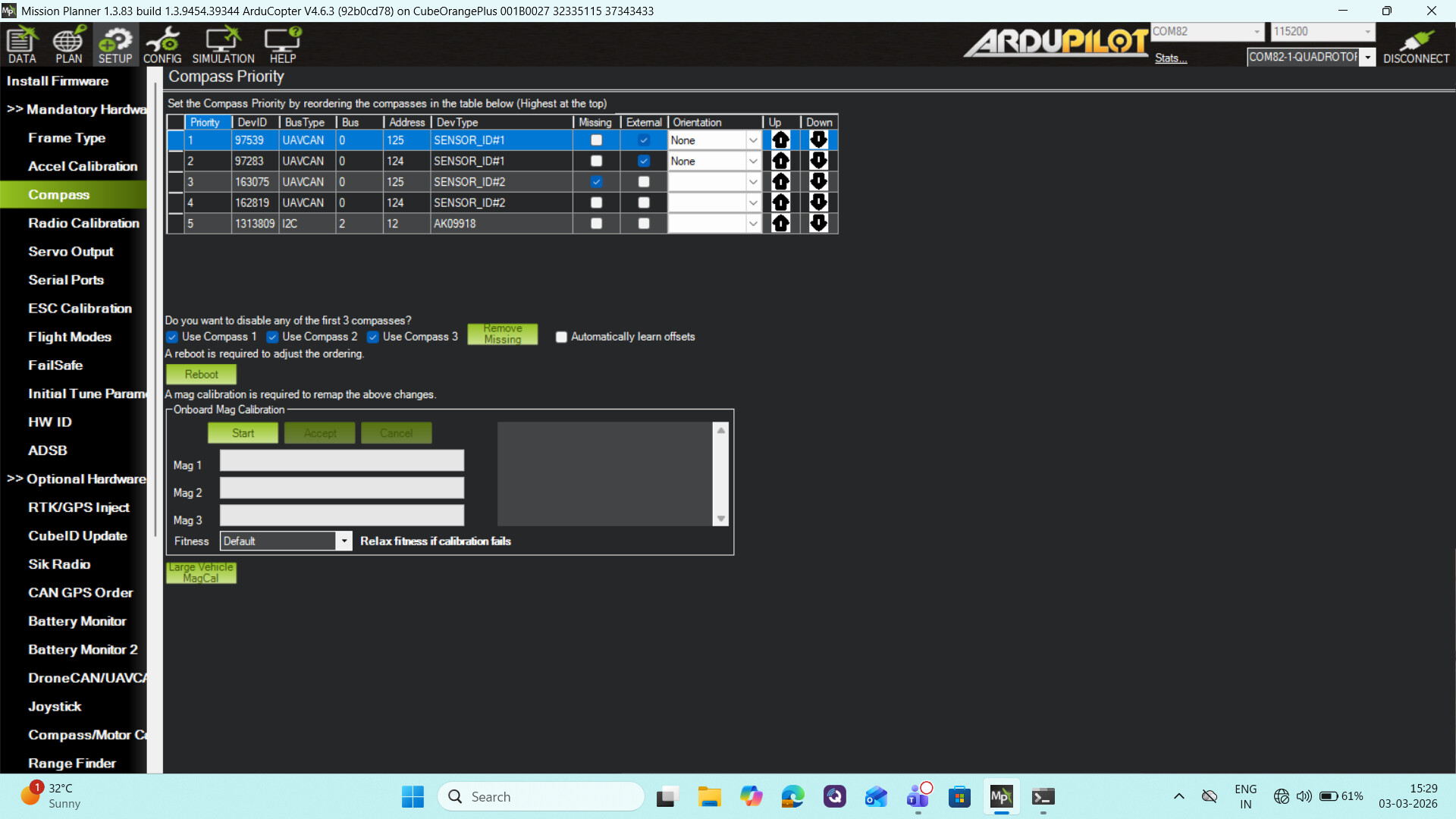
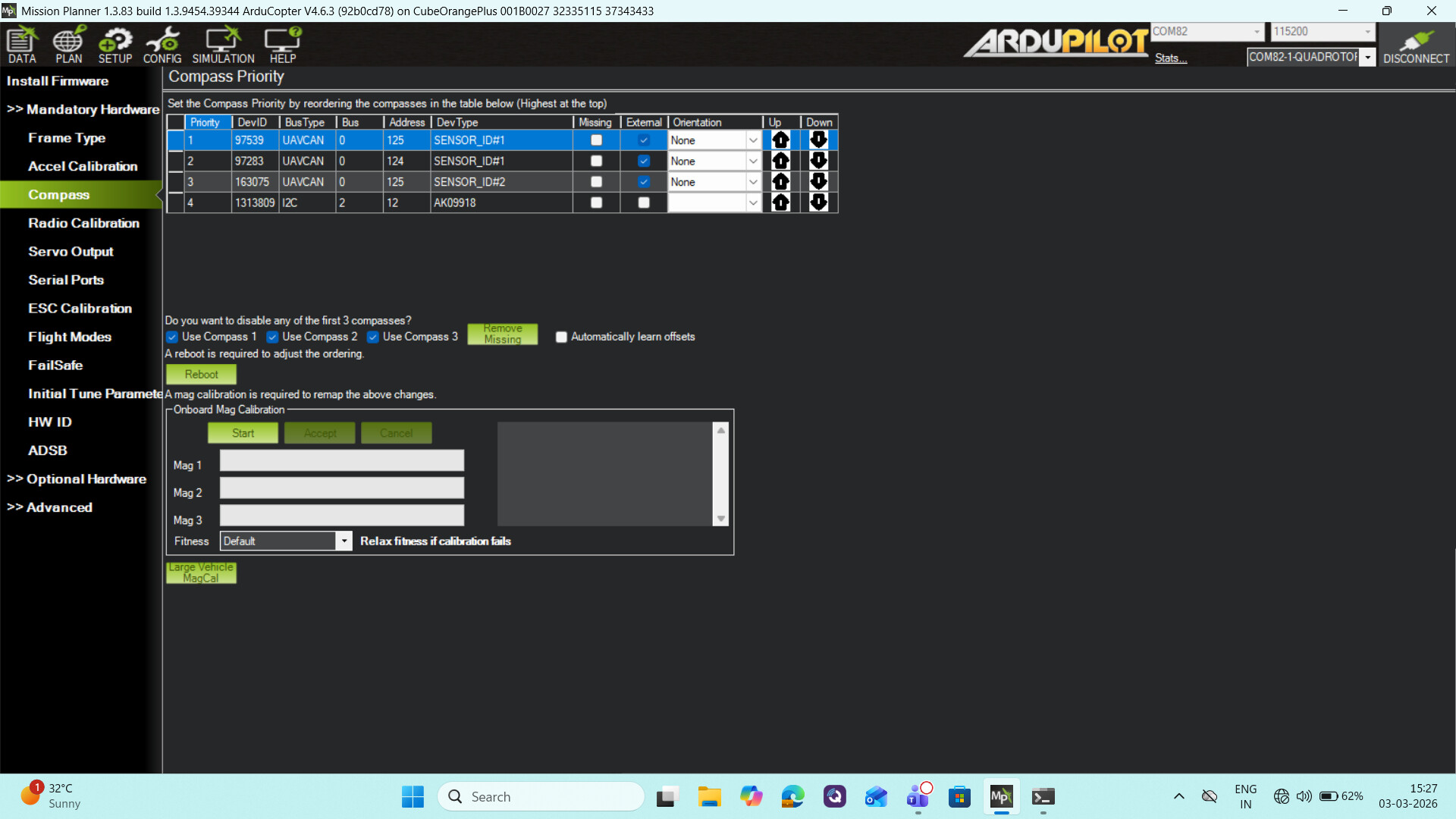
please refer the below screenshot each time either node of the compass is missing which lead prearm error everytime.
i have tried one more setting that completely disabled the one node compass which solved this problem.but i just want to use two compass atleast one in each node.
I would probably use the Setup / Optional / DronCAN section of MissionPlanner to adjust the internal parameters of each Here4 to disable the second compass.
See the Here4 manual around updating firmware which shows how to adjust the parameters.
After you’ve got that working OK, 1 compass per Here4, probably move one of the Here4’s to the CAN B bus for some level of redundancy.
I’m going to grab some screenshots for you, but I just cant do that right now.
please see description I mentioned in the topic that I have modified here4 internal parameter COMPASS_ USE2 = 0 on both the nodes but on the next boot it’s appears again.
If you provide more input with settings or screenshot it’s very useful for me.
I did “Write Params” then “Commit Params” and COMPASS_USE2,0 was saved to the Here4 across reboots, However that did not have the effect I hoped for - two compasses were still presented over CAN.
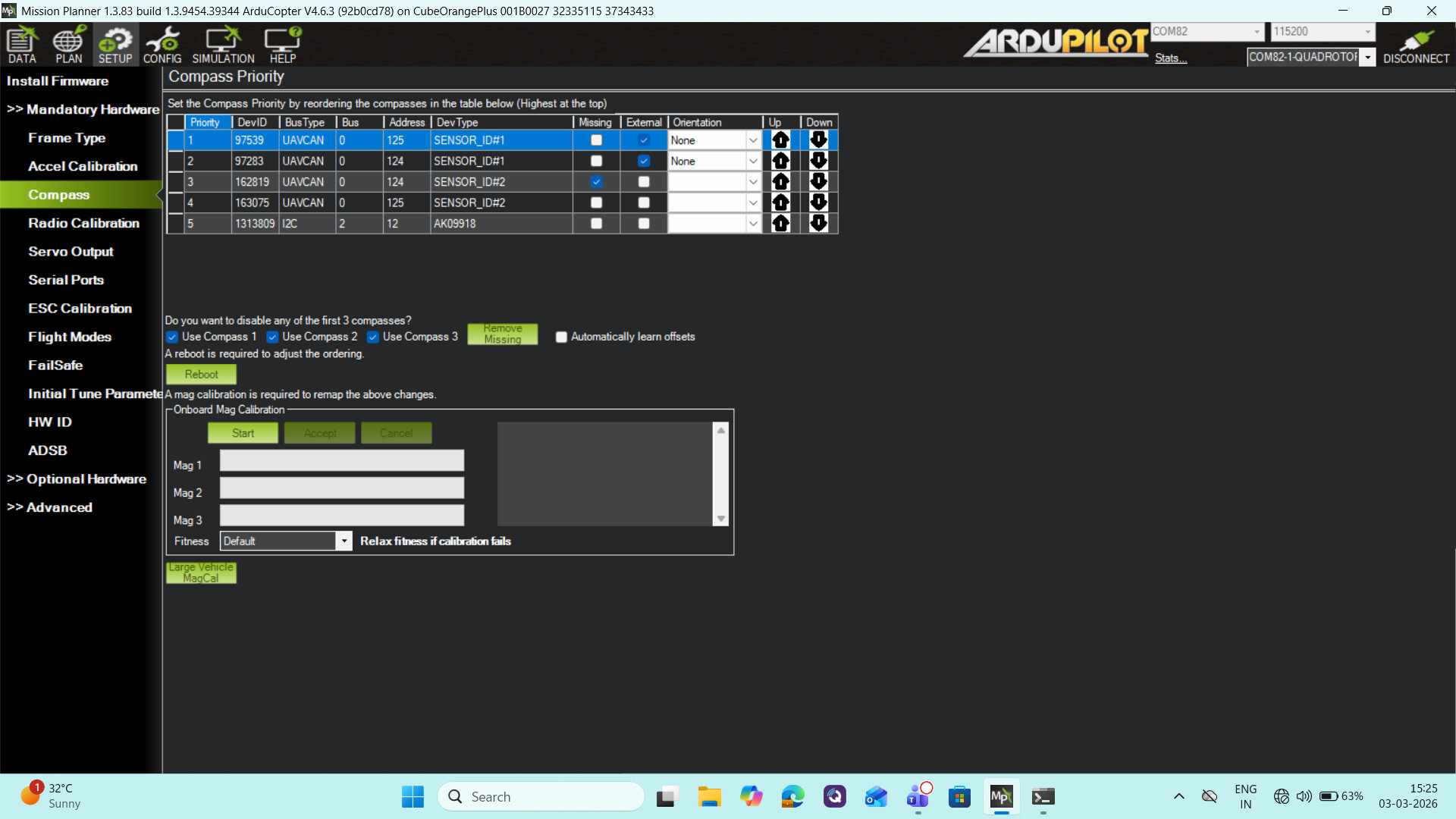
Can you try moving the I2C (internal) compass up the priority list to position 3, and also see how it all behaves with one of the Here4’s on CAN B bus.
Unfortunately I dont have two Here4’s to play with.
I wonder if @CraigElder could shed some light on this: one compass from each Here4, or at least consistent, reliable behaviour