Very excited to receive a new Here4 in the post. The integrated flight controller will be really useful for student built fixed wing models. I am planning to build a demo over the next few weeks but have some questions:
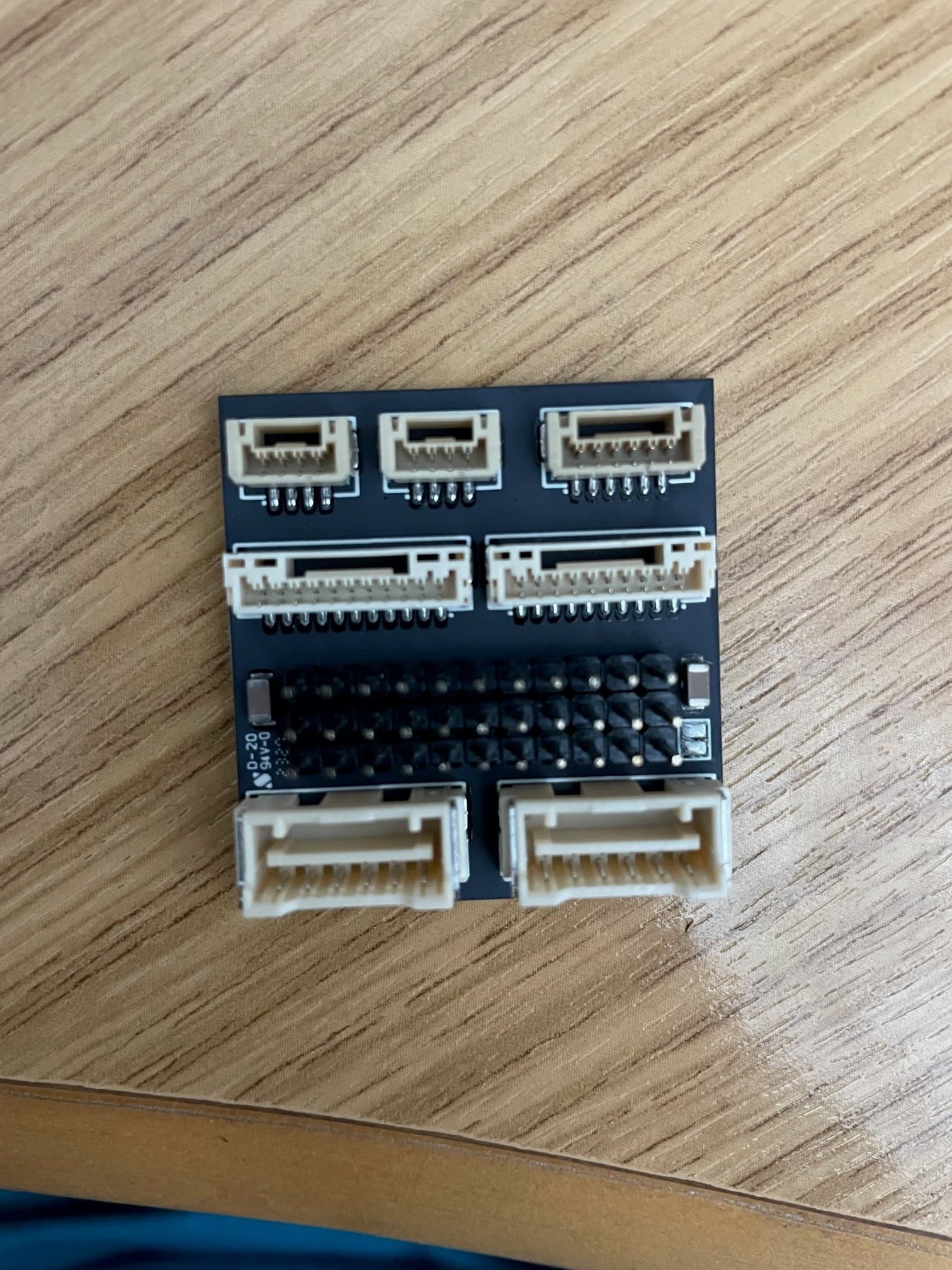
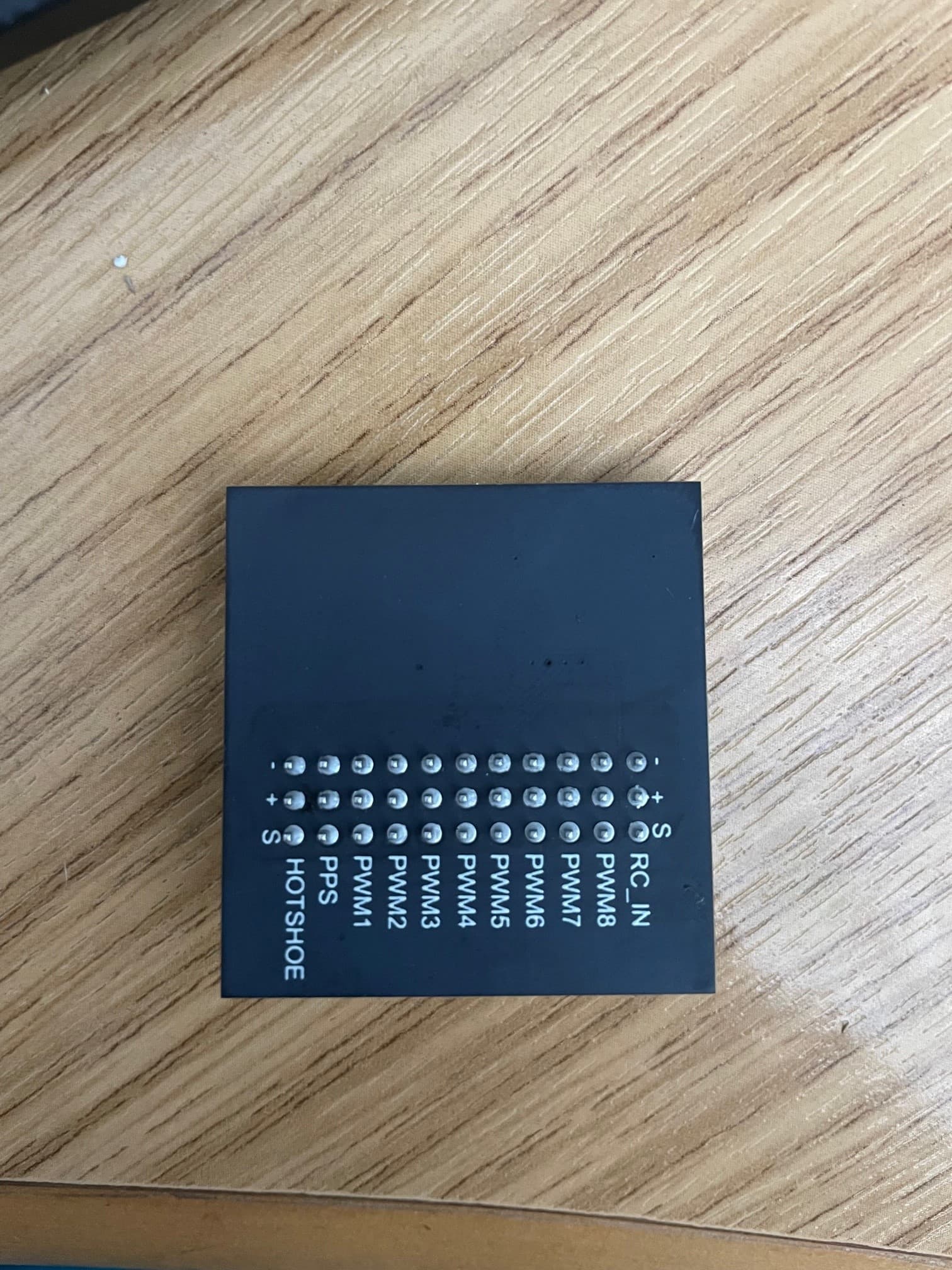
It came with some extra cables and a breakout board which is fantastic. Sadly the breakout board is not labeled and the existing documentation makes no mention of the pinouts etc.
Does anyone know what the full pinout schedule is for the here4 puck and also what the pinout on the breakout board is?
Is there are ardupilot build available yet that will run on the here4?
Happy to add the info to the ardu wiki / write a blog on setting this up but it would help massively to have the correct pinouts
@godlewski991 The idea is to have possibility of running full flight stack on board. The splitter board provides a way to get flight stack related IOs.
@sidbh Do you have an idea of when the firmware will be available to support ardupilot on the here4? This is something we are really keen to experiment with.
Hi @sidbh, That’s great news. If you need any testing, happy to help. I have the hardware sat on my desk.
I note there is no USB interface, is it possible to use a USB>CAN interface for upgrading firmware and adjusting parameters? Any recommendations for that hardware?
Nice to hear @sidbh , we also would like to get the raw IMU data from the Here4, but couldn’t find how on the github repo for the AP_PERIPH.
Any hints?
@HeliEngadin the latest master is able to publish IMU data over can GitHub - CubePilot/GNSSPeriph-release . If you can’t build the firmware locally you can use the firmware built by CI, just head to Actions tab and check the artifacts
By default IMU data is not published, so to enable and set the sample rate in Hz you will need to set IMU_SAMPLE_RATE parameter in Here4. Please note that if your sample rate is too high depending on the CAN traffic conditions there might be some packets dropped as a result. Verify that that’s not happening by Enabling Node Stats by setting DEBUG param to 4 and use dronecan_gui_tool to view the bus congestion.
Appreciate the effort, seems like the “can_imu_update” function has the prototype and it’s called by the scheduler, but is not implemented anywhere…
Build fails, can you please check if a commit containing it was not submitted? Thanks!
You mention in the PR comments that you’ve a firmware using here 4 blue BT for telemetry. Would this be instead of as remoteID, or in addition to? Could you guesstimate the practical range of BT telem?
The development so far has been with remoteID alongside. This feature is still under development, the full scope of capabilities are still to be developed and tested.
PS: please create a separate post when asking a new question.