@Ashish_Abraham_Math please disable Baro on Here4. It should not be used, unless its decased. Use parameter BARO_ENABLE set it to 0 on Here4. It has been disabled by default for recent versions.
Hi @sidbh
We have disabled Baro on GPS & we are still getting altitude errors of 5-10m.
@Ashish_Abraham_Math Even the difference between v1.9 and v1.10 is not something that should impact signal quality. I would recommend few more changes. Can you upgrade to latest release (through mission planner or release section on the github repo) and set parameter GPS_DRV_OPTIONS to 32 on Here4 GPS. That parameter forces use of L5 signal if disabled and also GPS L5.
Hi Ashesh,
Could you share the procedure for downgrading the Here 4 firmware?
We have upgraded a Here 4 to 1.13 and now it does not get any GPS anymore.
I would like to downgrade to see whether I can get the unit working again.
@RoelH The firmware version of Here4 itself should not cause variation in the GPS operational quality. Please follow the instructions to verify and update the ublox firmware here: Here 4 Manual - CubePilot . Do verify the existing firmware version on the UBlox module to ensure that you are not overwriting a valid firmware as noted in the documentation.
Both set of the cables are 4-pin, what does this statement mean?
“Connect the 4pin CAN cable from CAN port on Here 4 to CAN1 on the autopilot.”
Which color code set?
Is there an image example?
The images at the page are super low res, none is visible to user.
The images are not clickable to expand either.
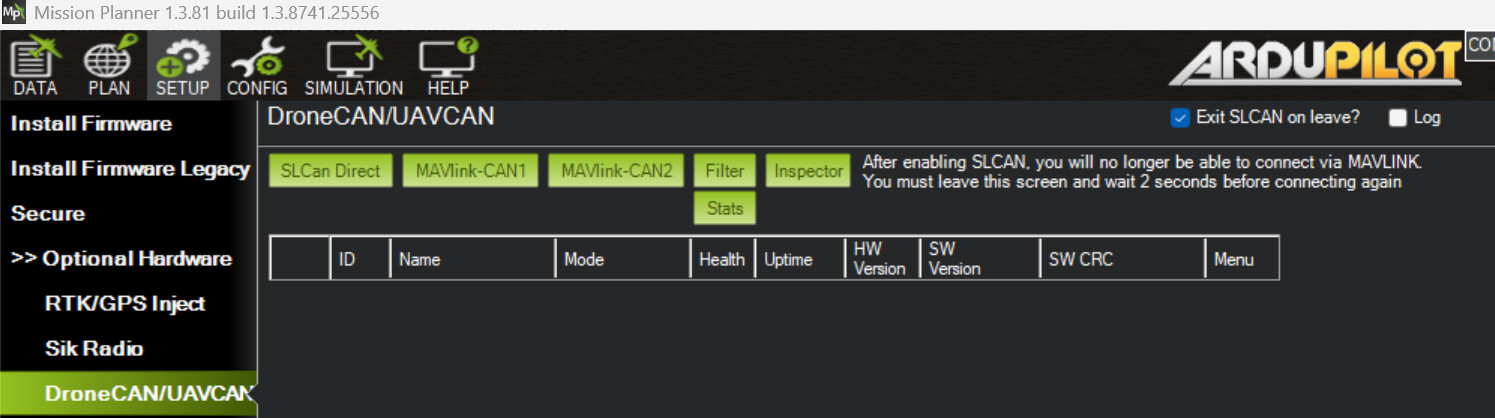
There is no such wording in the image and MP “Click SLCan Mode CAN1”.
“Connect the autopilot to Mission Planner and go to the UAVCAN screen. Click SLCan Mode CAN1 to load CAN GPS status.”

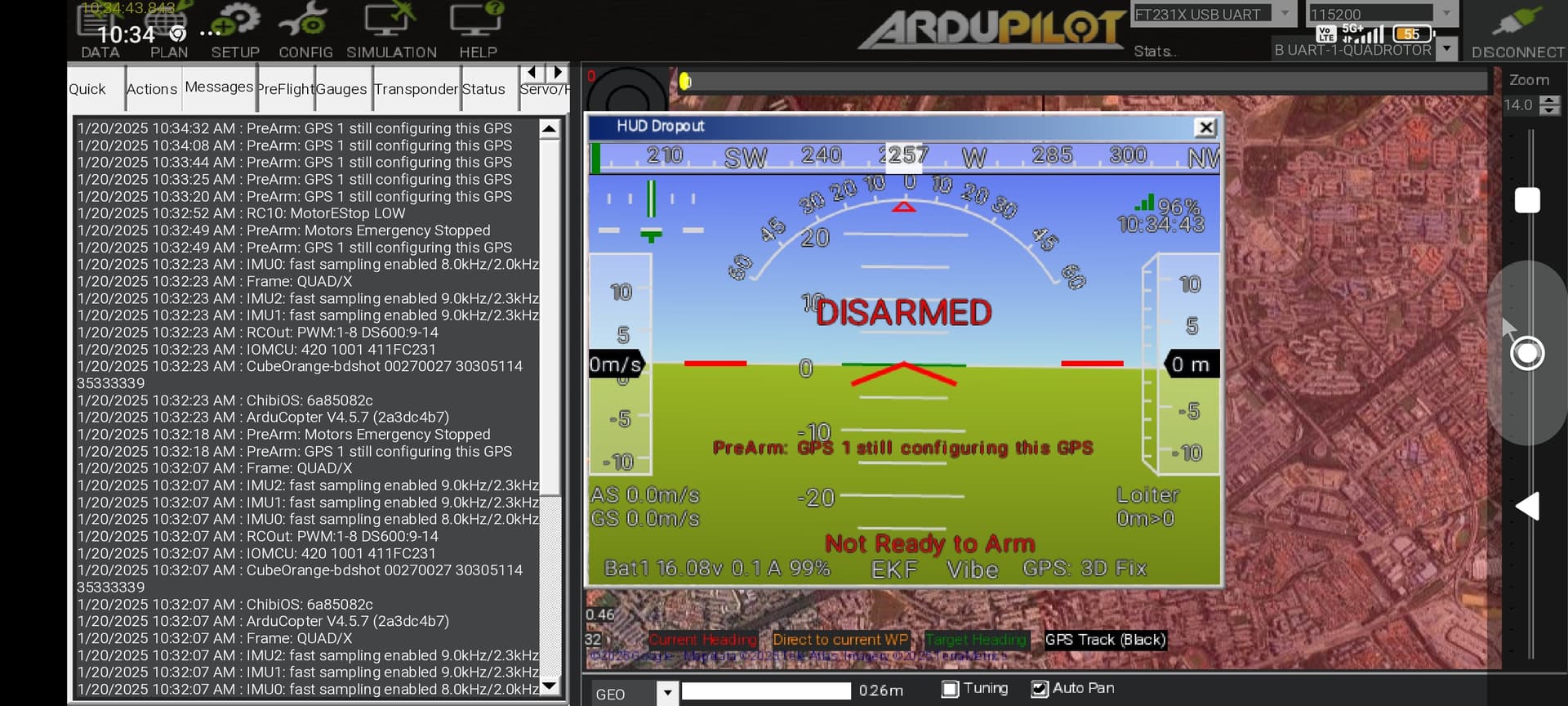
Currently I keep getting GPS 1 is still configuring this GPS and cannot arm. very disappointed to have migrate to Here4.
only CAN1-green、blue、white、grey is connected to CAN-1 of CubeOrange.
Connect the 4pin CAN cable from Here 4 to CAN1 or CAN2 on flight control.
(Note: Current firmware only supports CAN1-green、blue、white、grey)
CAN_D1_PROTOCOL,1
CAN_D1_PROTOCOL2,0
CAN_D1_UC_ESC_BM,0
CAN_D1_UC_ESC_OF,0
CAN_D1_UC_ESC_RV,0
CAN_D1_UC_NODE,10
CAN_D1_UC_NTF_RT,20
CAN_D1_UC_OPTION,0
CAN_D1_UC_POOL,16384
CAN_D1_UC_RLY_RT,0
CAN_D1_UC_SER_EN,0
CAN_D1_UC_SRV_BM,0
CAN_D1_UC_SRV_RT,50
CAN_D2_PROTOCOL,0
CAN_D2_PROTOCOL2,0
CAN_LOGLEVEL,0
CAN_P1_BITRATE,1000000
CAN_P1_DRIVER,1
CAN_P1_FDBITRATE,8
CAN_P2_DRIVER,0
GPS_AUTO_CONFIG,1
GPS_AUTO_SWITCH,1
GPS_BLEND_MASK,5
GPS_CAN_NODEID1,125
GPS_CAN_NODEID2,0
GPS_COM_PORT,1
GPS_COM_PORT2,1
GPS_DELAY_MS,0
GPS_DELAY_MS2,0
GPS_DRV_OPTIONS,0
GPS_GNSS_MODE,109
GPS_GNSS_MODE2,0
GPS_HDOP_GOOD,140
GPS_INJECT_TO,127
GPS_MB1_TYPE,0
GPS_MB2_TYPE,0
GPS_MIN_DGPS,100
GPS_MIN_ELEV,-100
GPS_NAVFILTER,8
GPS_POS1_X,0.095
GPS_POS1_Y,0
GPS_POS1_Z,-0.1
GPS_POS2_X,0
GPS_POS2_Y,0
GPS_POS2_Z,0
GPS_PRIMARY,0
GPS_RATE_MS,200
GPS_RATE_MS2,200
GPS_RAW_DATA,0
GPS_SAVE_CFG,2
GPS_SBAS_MODE,2
GPS_SBP_LOGMASK,-256
GPS_TYPE,9
GPS_TYPE2,0
GPS1_CAN_OVRIDE,0
GPS2_CAN_OVRIDE,0
Very frustrating.
[edit]
Managed to upgrade from 1.12 → 1.14 using the CAN1-green, blue, white, and grey 4-pin connector to CAN-1 FC port via desktop PC using SLCan direct with com port change to SLCAN, but when connecting using Mobile MP, it keeps prompting there is a new Here 4 GPS firmware. I am glad that “GPS 1 is still configuring this GPS” is no longer appearing. These two parameters seem auto modified by MP or Arducopter.
CAN_SLCAN_CPORT,1
CAN_SLCAN_TIMOUT,2
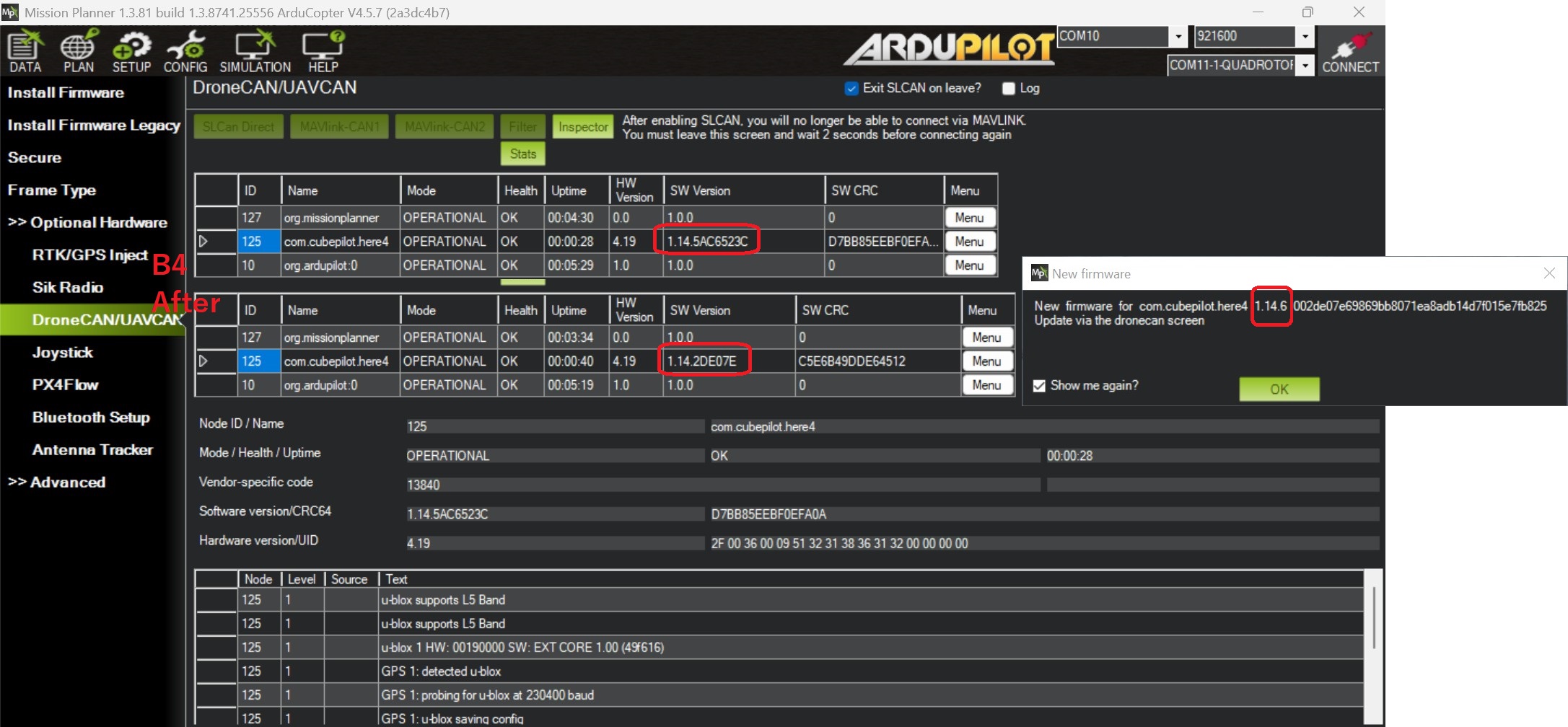
Which one is newer?


Is there an expert who can help guide me in tracing the software versioning and update status on the same HW UID? Is there an alternative method to trace?
I did an update, and I have no information about whether it was a success or a failure. I rebooted, and I tried both hardware and software methods.
After that, no more prompting for a new Here 4 firmware availability.
[Edit]
No, the 1.14.6 prompting is still appearing whenever I relaunch the MP. When I click update, it seems nothing is happening, and the SW version remains at 1.14.2DE07E.
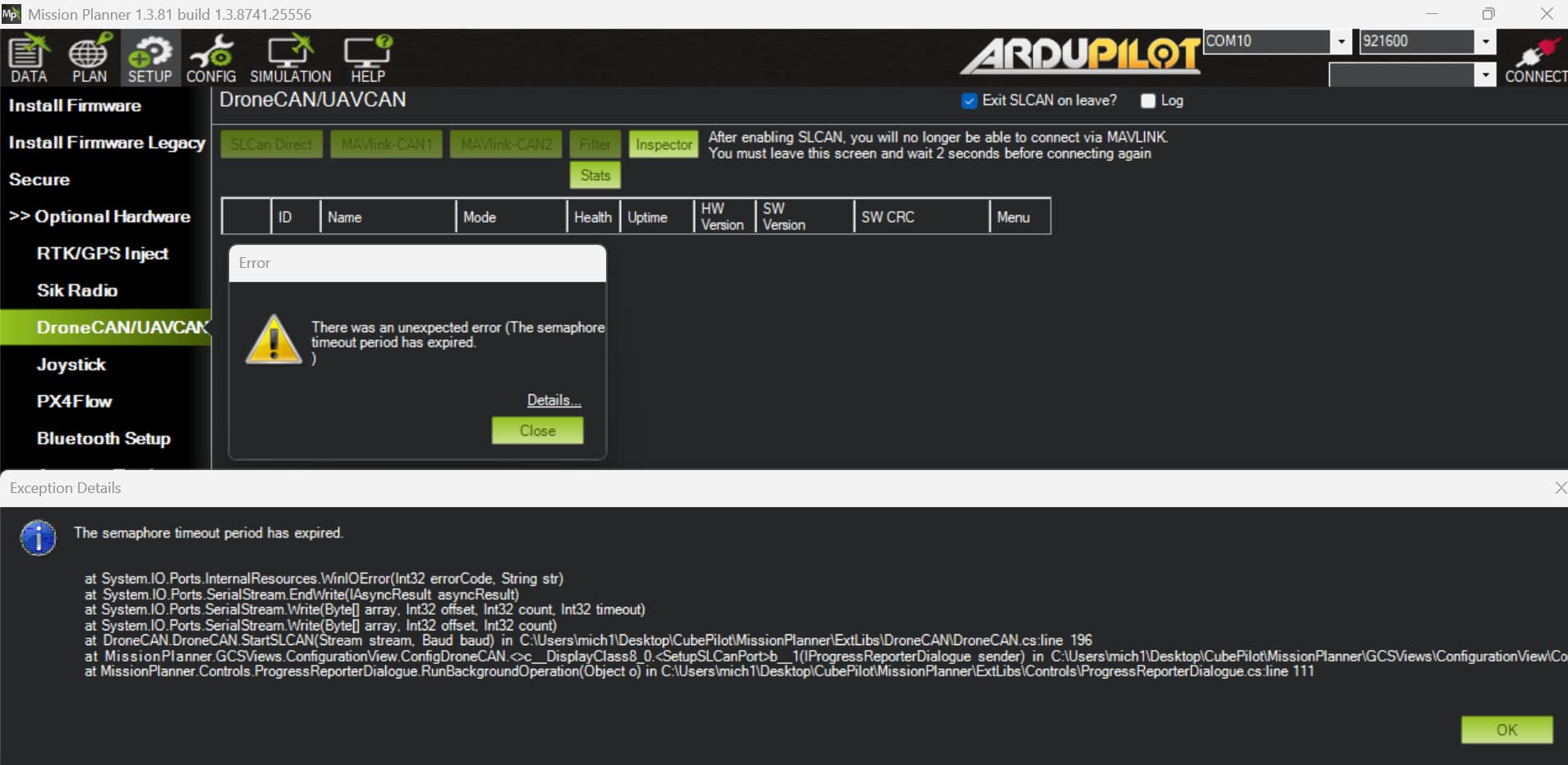
getting the same error. any fixes?